햄스터 AI 카메라와 엔트리 인공지능 탭의 비디오 감지, 모델 학습하기를 활용해 보아요.
모델 학습하기 기능과 그리퍼를 활용해 햄스터가 자동으로 재활용을 하게 만들어요.


부품을 준비해 주세요.
| 필요 재료 | 수량 |
|---|---|
| 햄스터 또는 햄스터S | 1개 |
| 햄스터 AI 카메라 | 1개 |
| 햄스터용 그리퍼(컵) | 1개(4개) |
| USB 동글 | 1개 |
| 무선 네트워크 어댑터 | 1개 |
| 컴퓨터 | 1대 |
하드웨어를 준비해요.
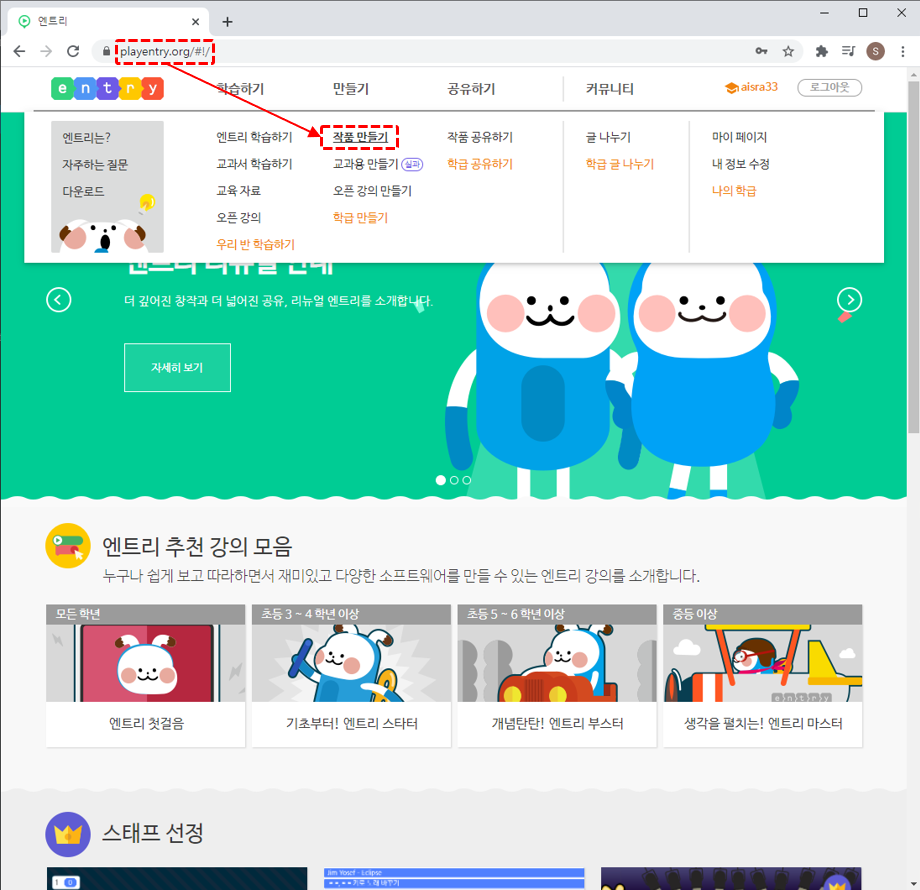
1-1. 엔트리 사이트의 작품 만들기 탭을 클릭해 엔트리 온라인에 접속합니다.
이 때는 ‘엔트리 하드웨어’로 하드웨어를 연결합니다.

1-2. 로봇 코딩 소프트웨어를 사용할 때에도 엔트리 온라인을 선택해 접속합니다.
코딩을 해요.
알고 가기
비디오 감지 블록 추가하기
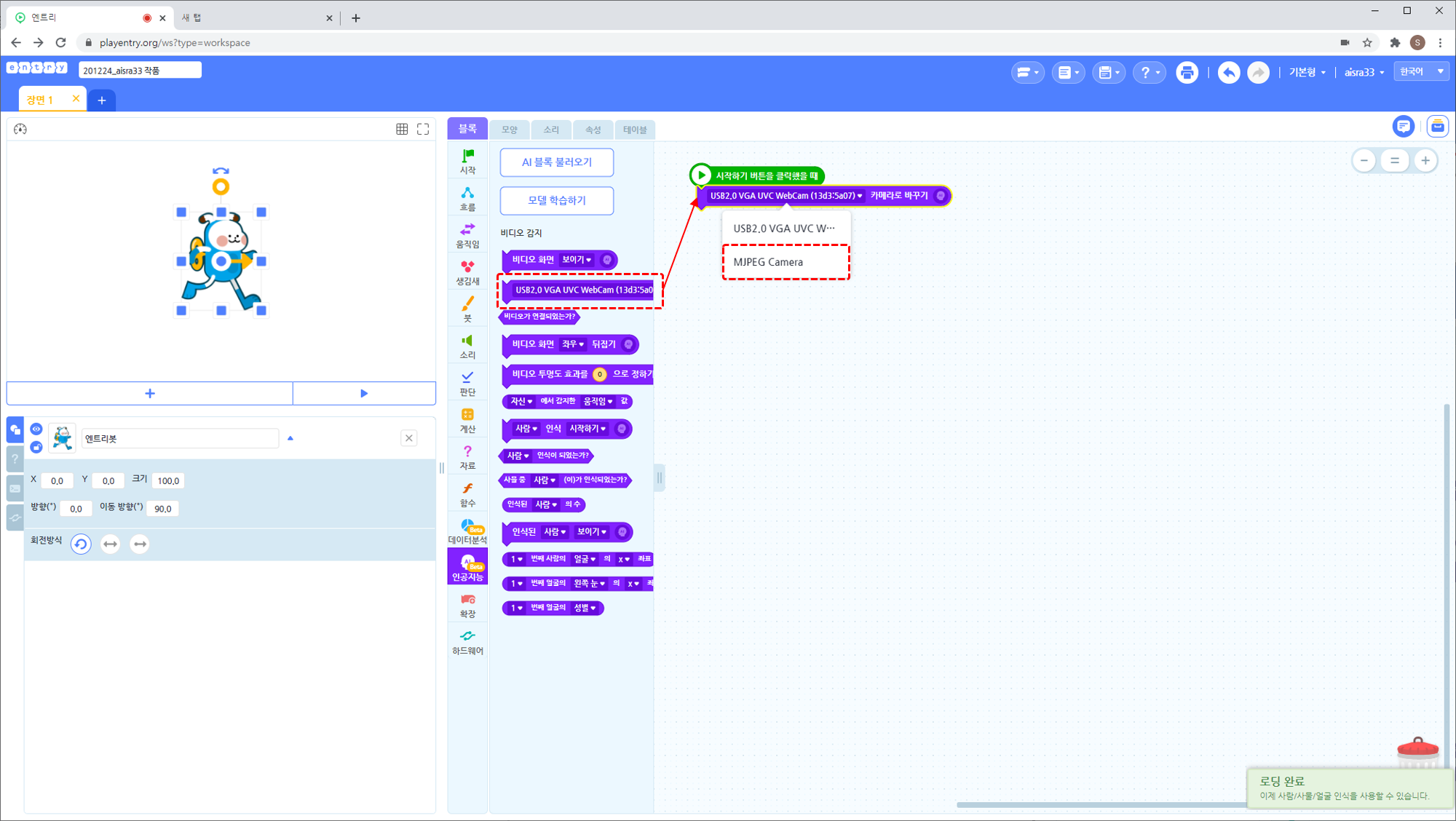
코딩을 시작하기 전 ‘비디오 감지’ 블록을 추가하는 법을 알아보아요.
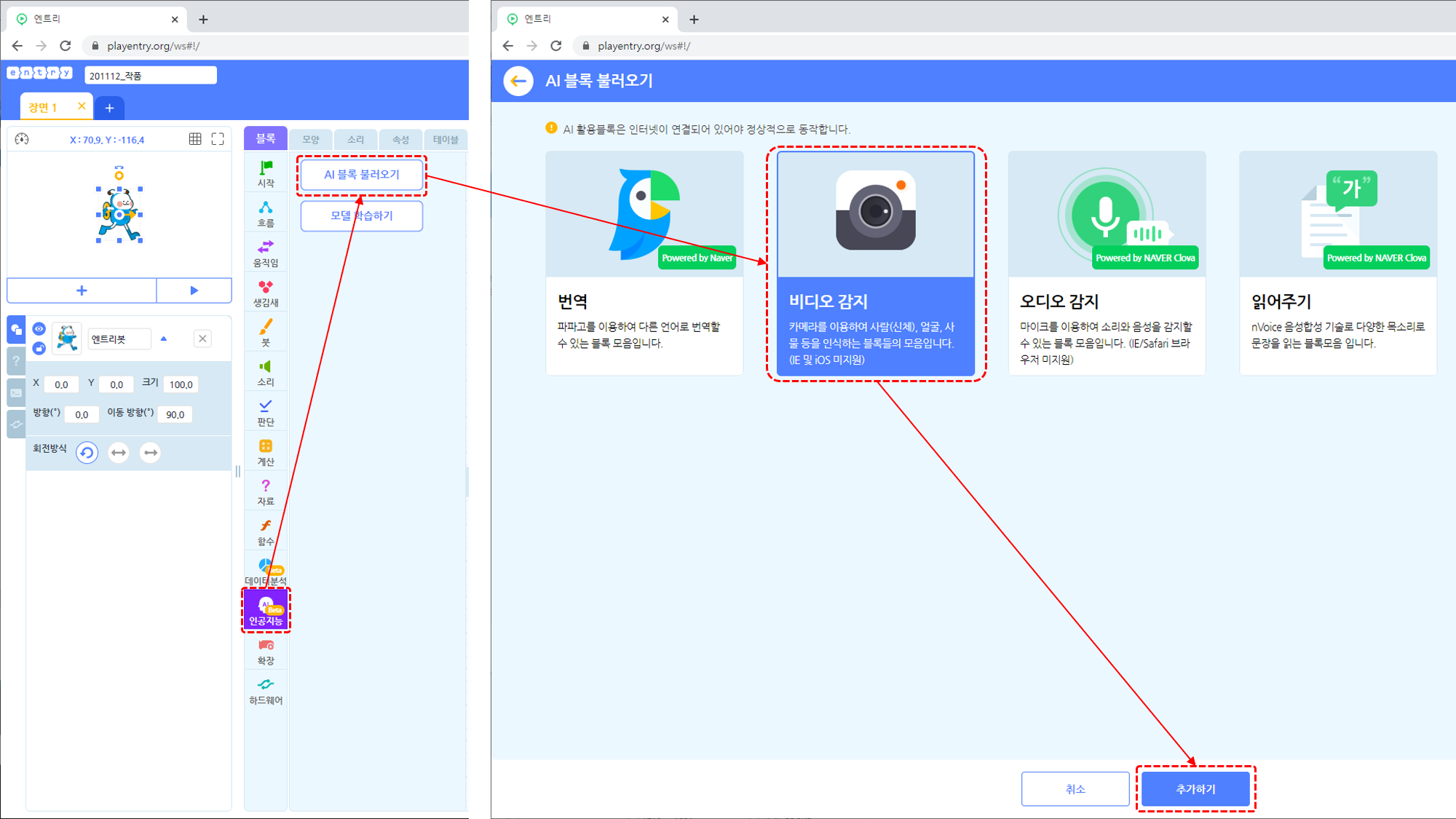
블록이 모두 추가되면 햄스터 AI 카메라 영상을 사용할 수 있도록 ‘~카메라로 바꾸기’ 블록에서 MJPEG Camera를 선택합니다.
모델 학습하기
아래 버튼을 클릭하면 엔트리에서 제공하는 모델 학습하기 튜토리얼 페이지로 이동합니다.
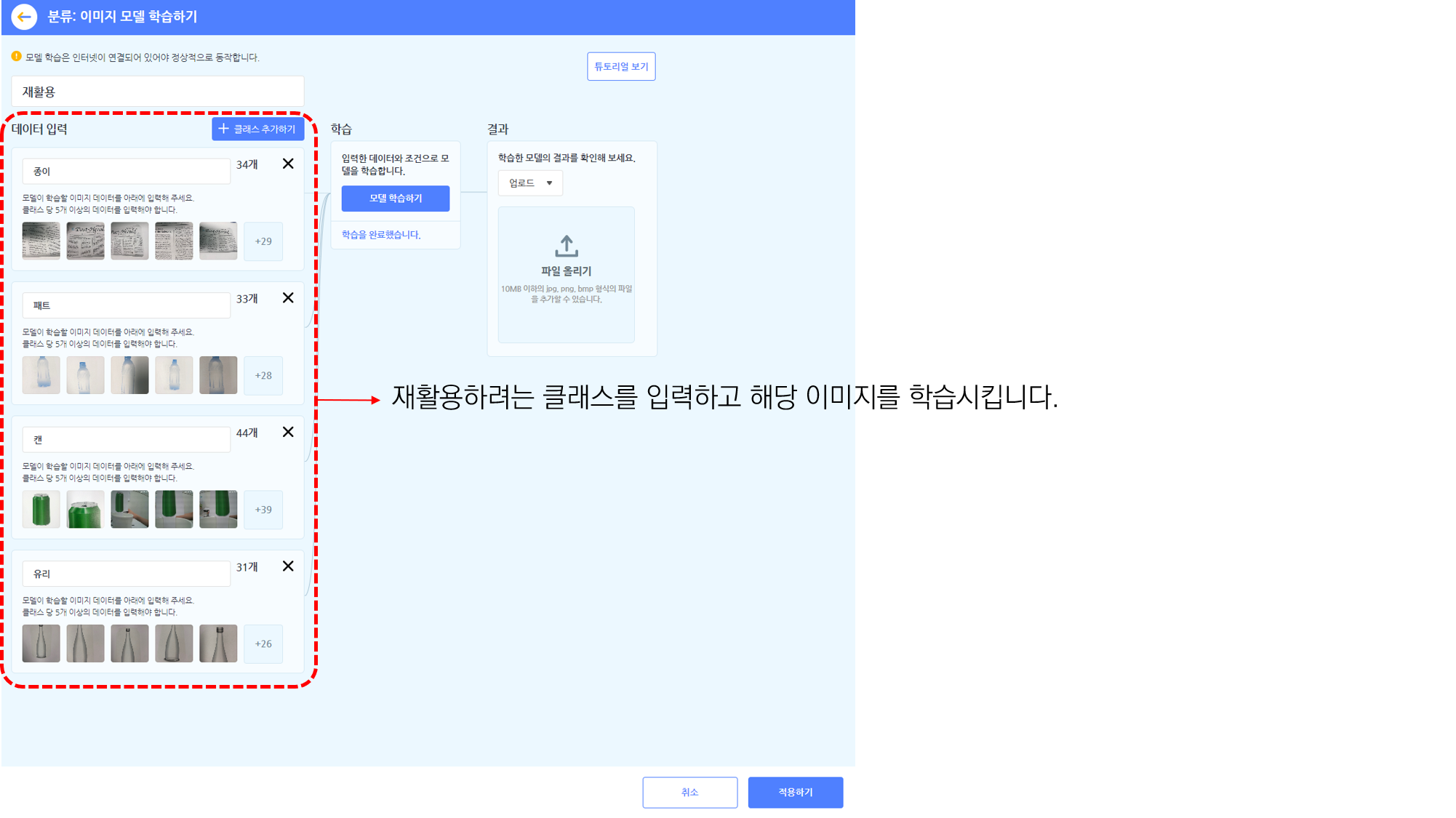
이번 프로젝트를 위해서는 캔, 유리, 페트, 종이 이미지를 촬영하여 학습시켰습니다.
코딩 하기
* 아래의 블록들은 연결해서 작성해야 하지만 설명을 위해 분리해 놓았어요.
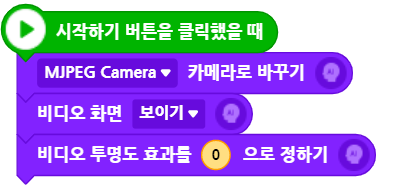
1. 비디오 화면을 불러오는 코드를 작성합니다.
‘비디오 화면 보이기’를 실행하면 실행 화면에 카메라의 영상이 나타납니다.
투명도 값이 작을 수록 화면이 선명하게 보입니다. 값을 100으로 정하면 실행 화면에 카메라가 비추는 장면이 보이지 않습니다.
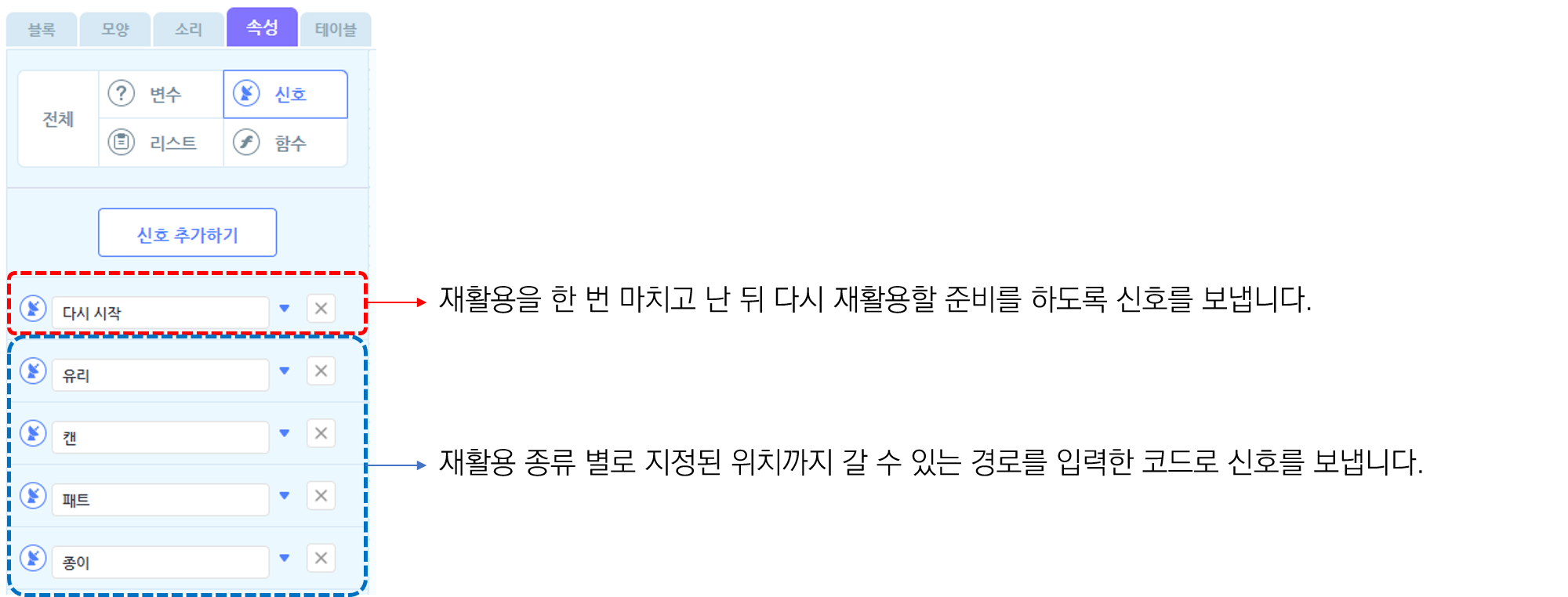
2. 코드에 사용할 속성을 추가합니다.
신호 추가하기
함수 추가하기
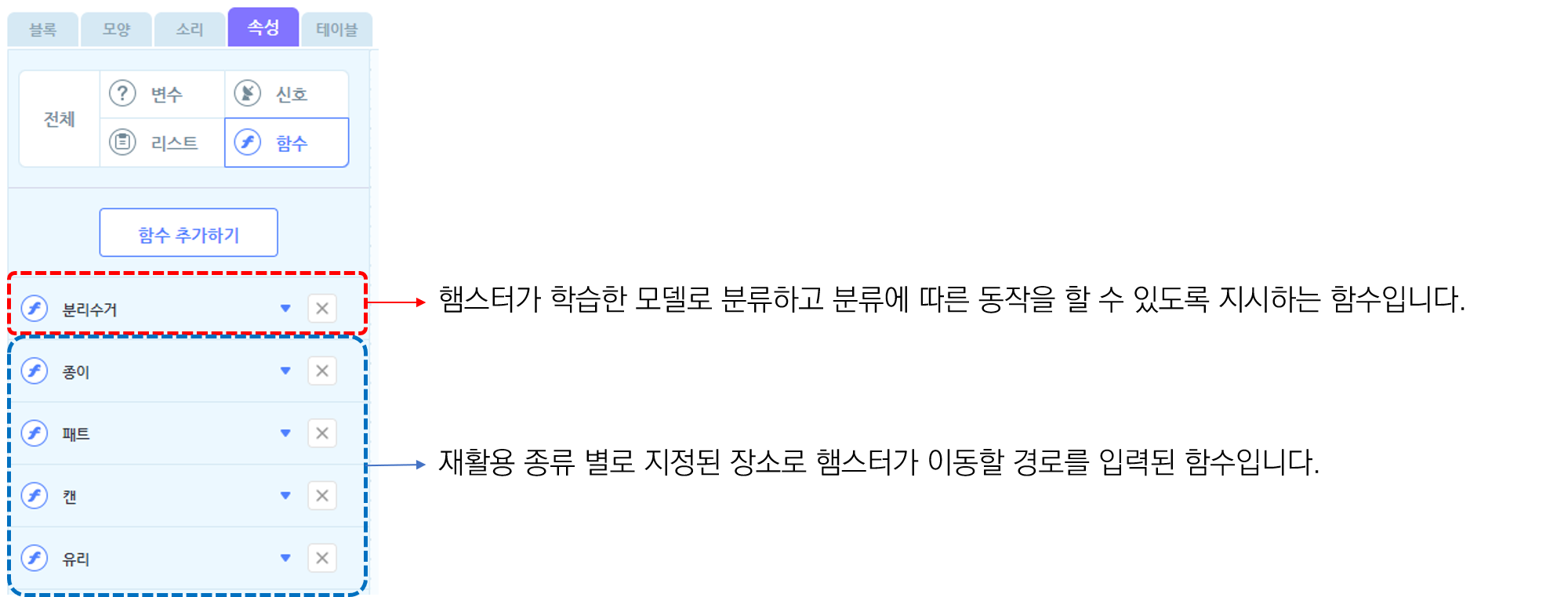
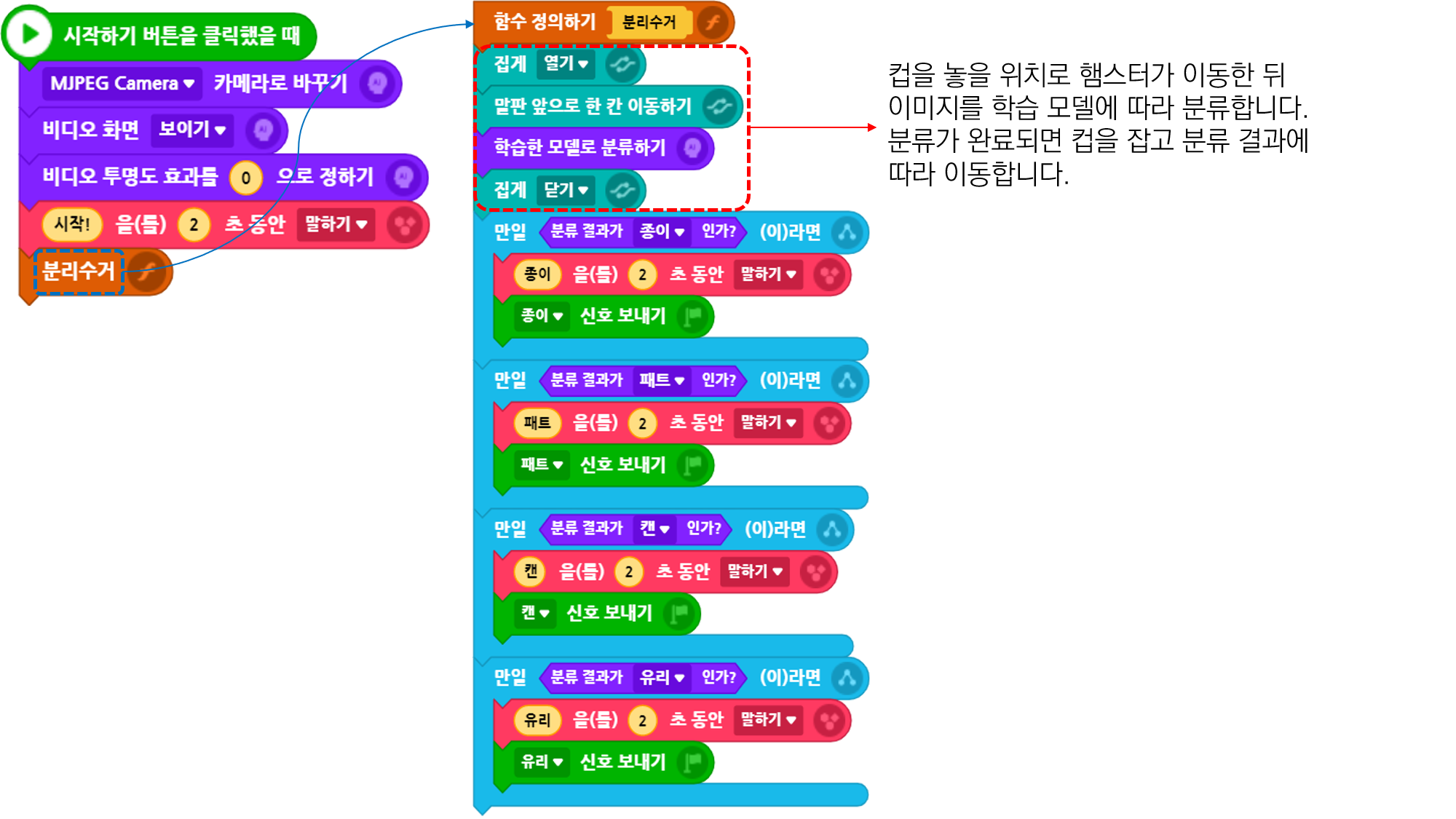
3. 학습한 모델로 분류하는 코드를 작성합니다.
조건문으로 각 분류에 맞는 신호를 보내는 코드를 함수를 사용해 작성합니다.
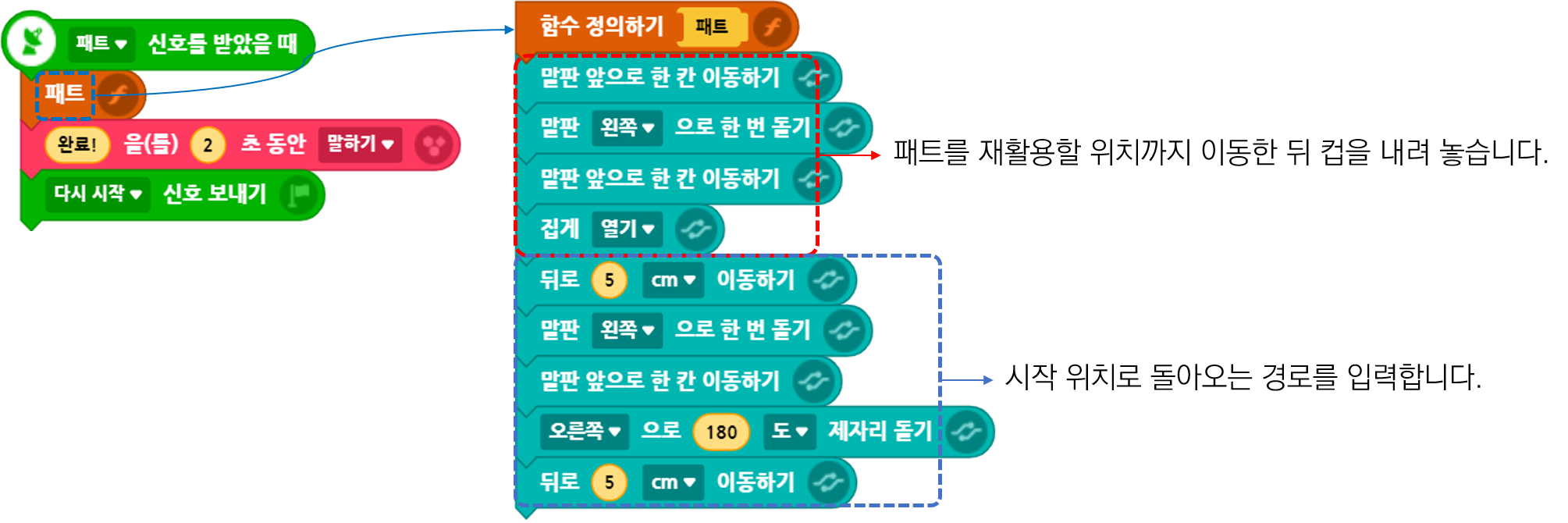
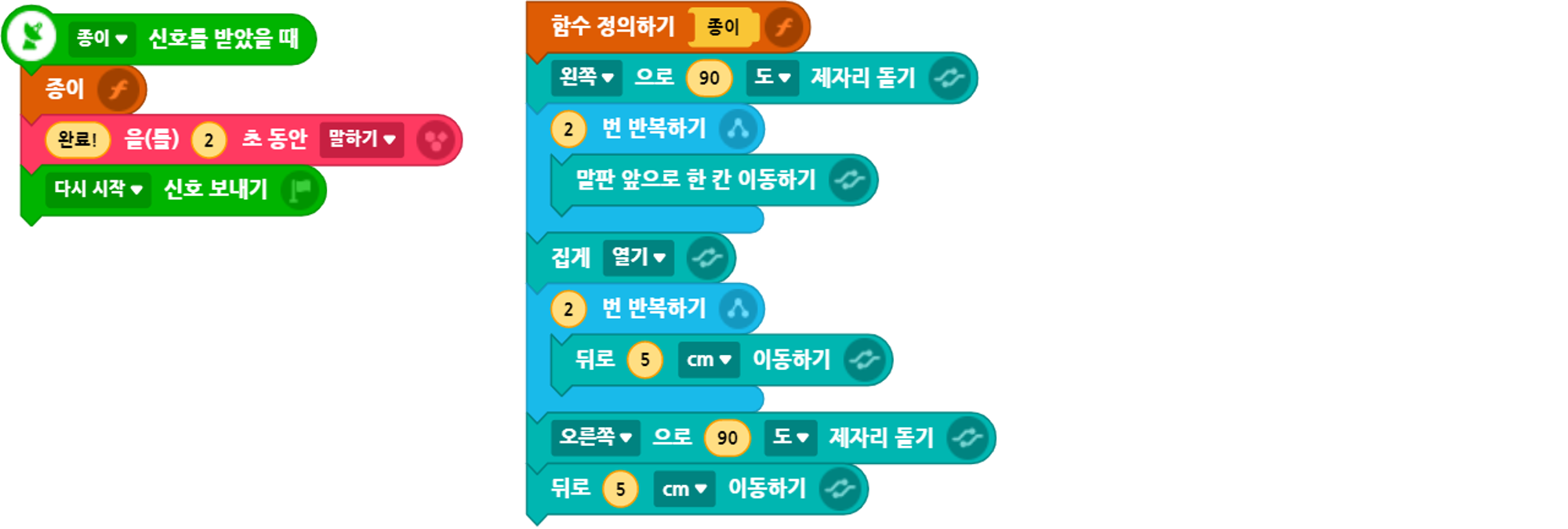
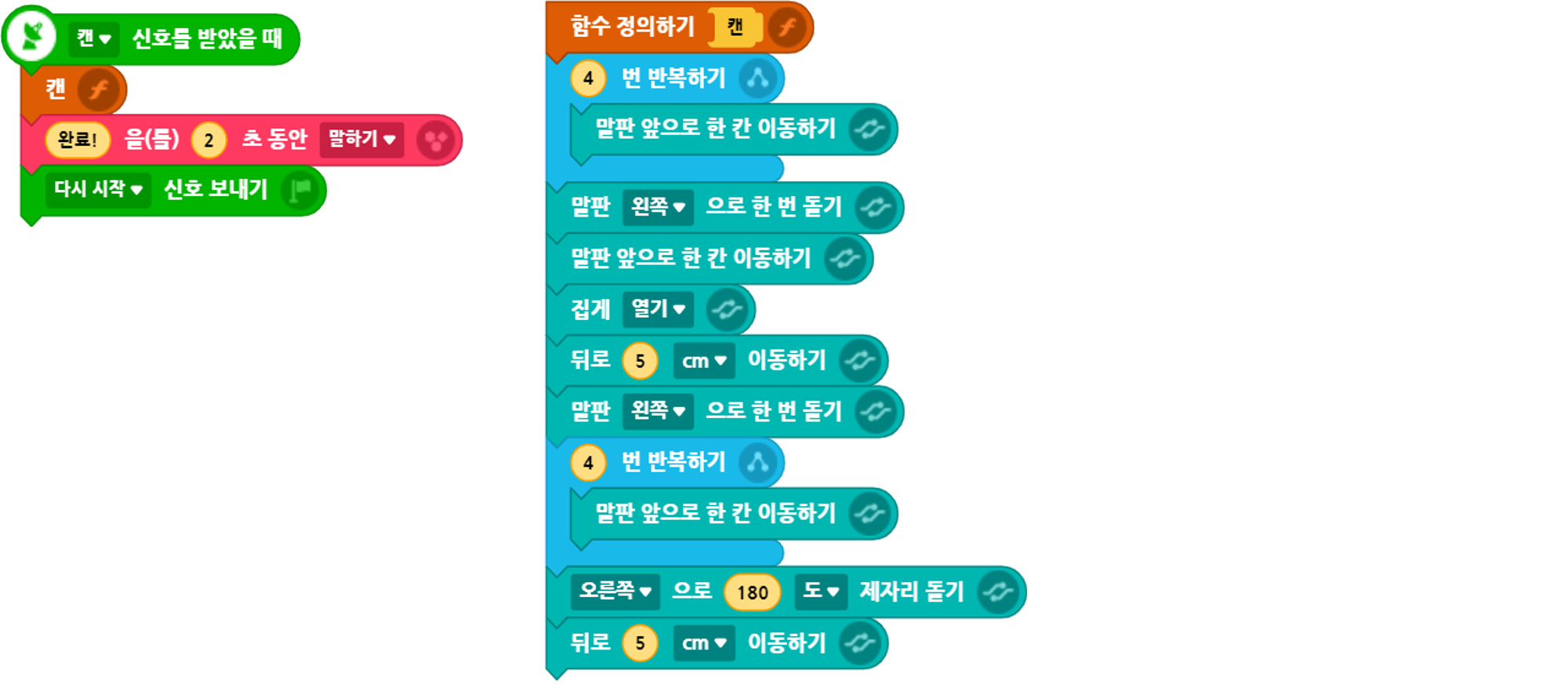
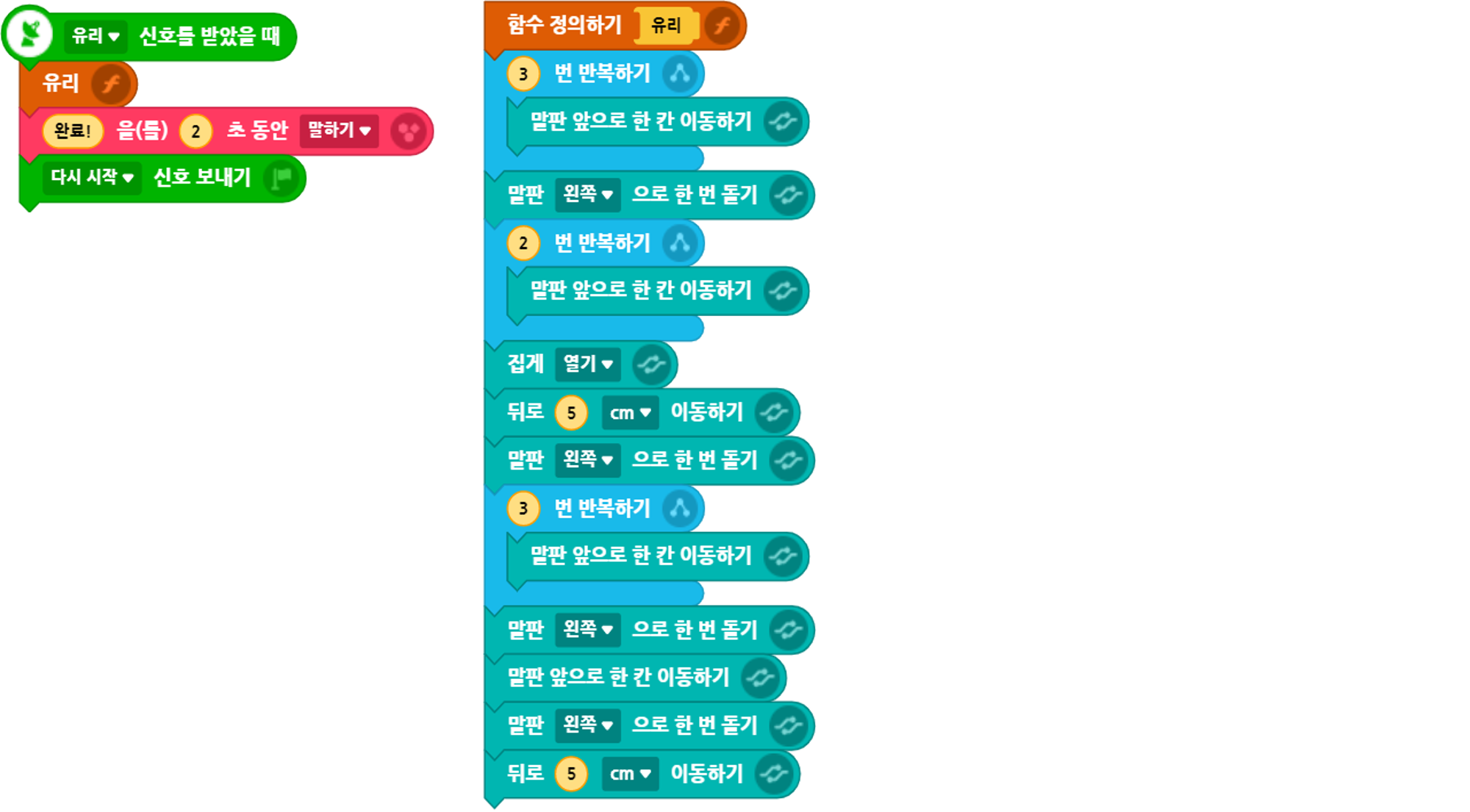
4. 재활용 종류 별로 지정된 장소로 이동하는 코드를 작성합니다.
해당 신호를 받으면 햄스터가 함수에 입력한 경로로 이동하고 엔트리 봇이 ‘완료!’를 말합니다.
한 번의 재활용이 완료되면 ‘다시 시작’ 신호를 보내 코드를 다시 시작합니다.
<패트 경로>
<종이 경로>
<캔 경로>
<유리 경로>
경로는 여러분이 원하는 대로 자유롭게 지정하셔도 됩니다.
5. 다시 시작하는 코드를 작성합니다.
재활용 동작이 한 번 끝나면 엔트리 봇이 ‘준비’를 말하고 전체 코드를 처음부터 다시 실행합니다.

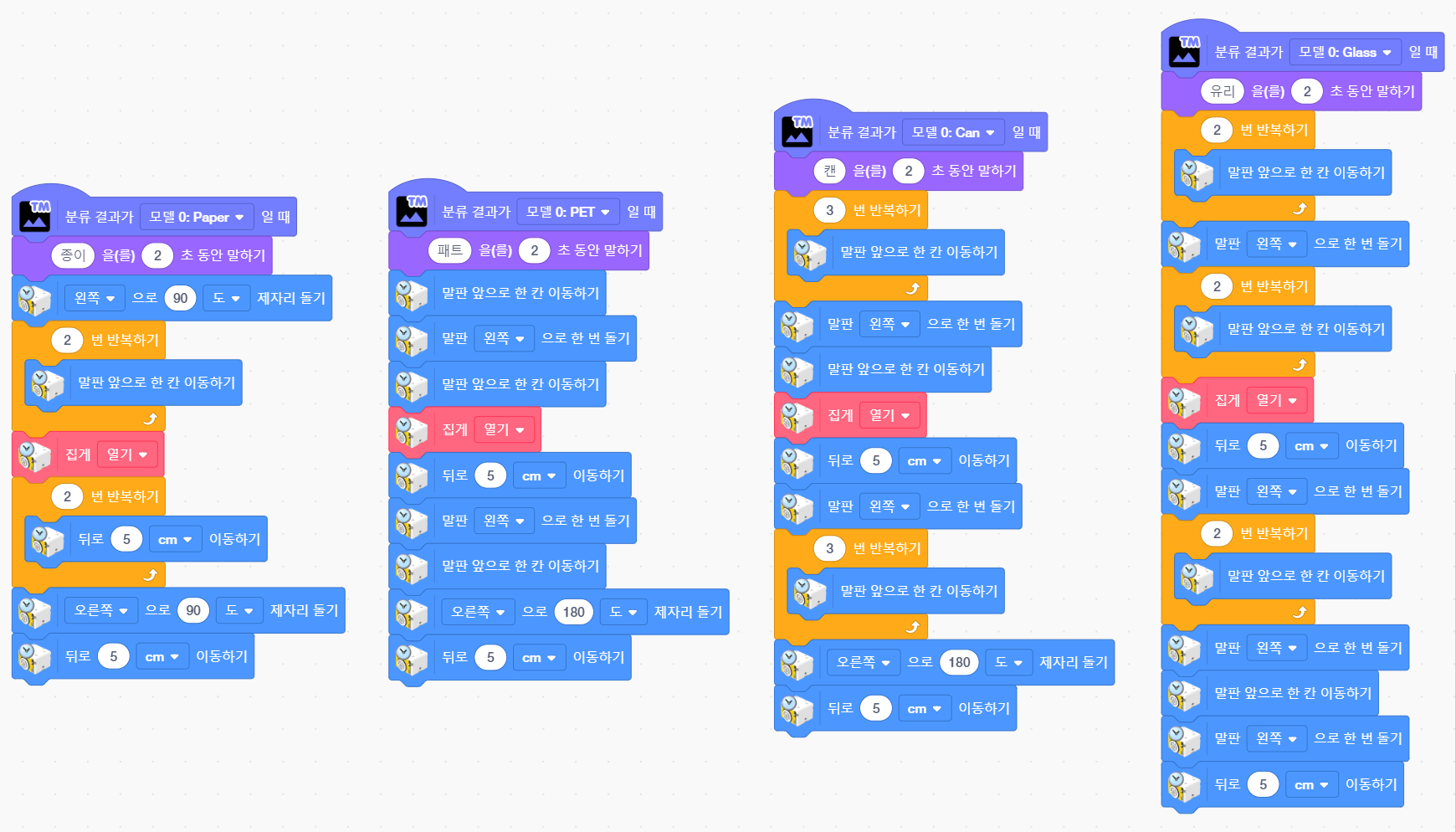
6. 스크래치 코드입니다.
스크래치는 티처블 머신을 활용해 작업을 수행합니다.
햄스터가 모델을 분류하고 컵을 잡는 코드입니다.
햄스터가 컵을 놓고 제자리로 돌아오면 스페이스 키를 눌러 다시 분류하기를 수행할 수 있습니다.

분류 결과에 따라 햄스터가 이동할 코드를 작성합니다.
응용하기
여러분 만의 모델을 만들어 재활용을 해 보아요.
