치즈 스틱 부품 알아보기
치즈 스틱 부품 알아보기
치즈 스틱 부품 알아보기
치즈 스틱 부품 알아보기
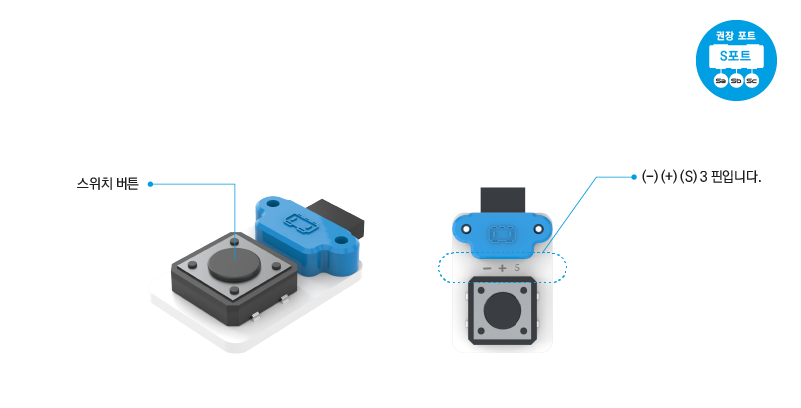
스위치는 택트 스위치(Tact Switch)로 버튼을 누르면 신호를 감지합니다.
엘리베이터 버튼, 비디오 게임의 버튼 등으로 사용되고 있습니다.
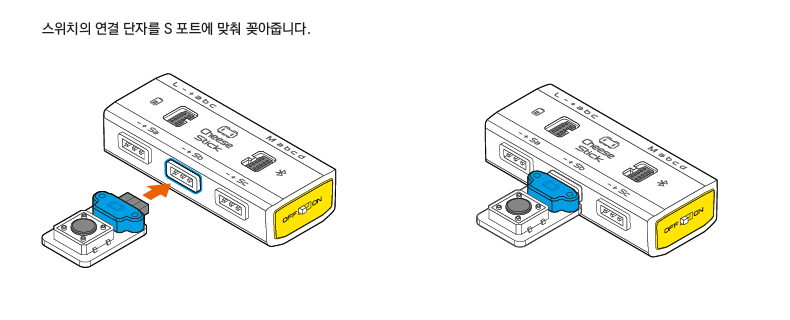
스위치를 버튼으로 이용하기 위해서 연결된 포트를 알맞게 선택하고 ‘버튼’입력으로 설정해 주세요.

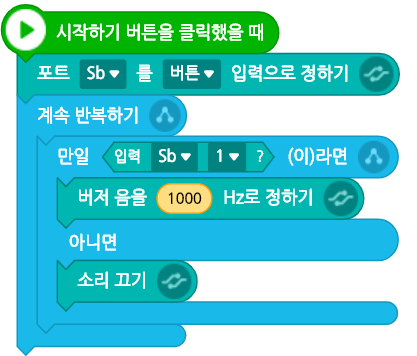
치즈 스틱에 실제 버튼을 연결한 포트(예시의 경우 Sb 포트)와 같은 포트의 입력값을 ‘버튼’으로 정합니다.
버튼의 입력은 ‘1과 0’으로 나뉩니다.
버튼을 누르면 ‘1’, 누르지 않으면 ‘0’입니다.
위 코드는 버튼을 누르면 버저 음이 나고 누르지 않으면 소리가 나지 않도록 작성했습니다.
손잡이를 돌려 저항 값을 조절해 전기의 흐름을 변화시킵니다.
오디오의 볼륨 조절 장치, 밝기 조절 장치 등의 전자 제품에서 사용되고 있습니다.

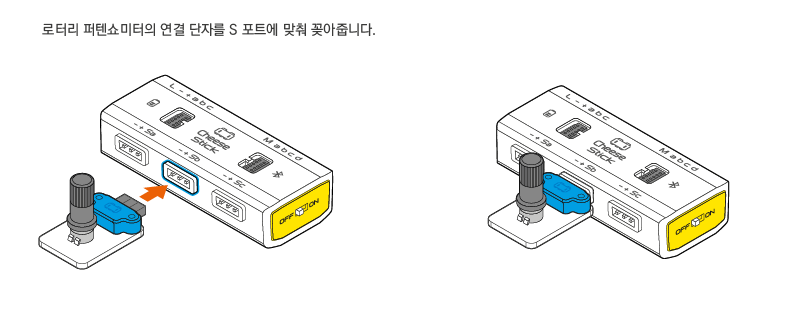
로터리 퍼텐쇼미터를 연결한 포트를 바르게 설정하고, ‘아날로그’입력으로 설정해 사용하세요.


로터리 퍼텐쇼미터의 아날로그 입력값을 버저 음의 값(Hz)으로 정하는 코드입니다.
아날로그 입력값은 대략 ‘0~255’사이의 값을 가집니다.
Sc 입력에 10을 곱하는 것은 버저음의 변화를 더 크게 하기 위해서 입니다.
이렇게 하면 로터리 퍼텐쇼미터를 돌릴 때마다 버저 음이 변하는 정도가 커져 값이 변하는 것을 명료하게 인식할 수 있습니다.
버저 음은 값이 작을 수록 낮은 음, 클 수록 높은 음을 냅니다.
서보모터는 주어진 신호에 따라 위치를 제어할 수 있는 모터입니다.
자동차 와이퍼, 주차 차단기, 로봇 팔, 산업용 제조 라인에 이르기까지 넓은 분야에서 사용되고 있습니다.
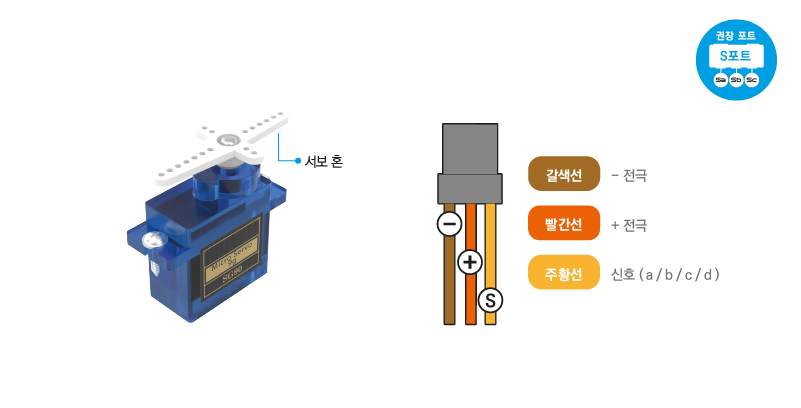
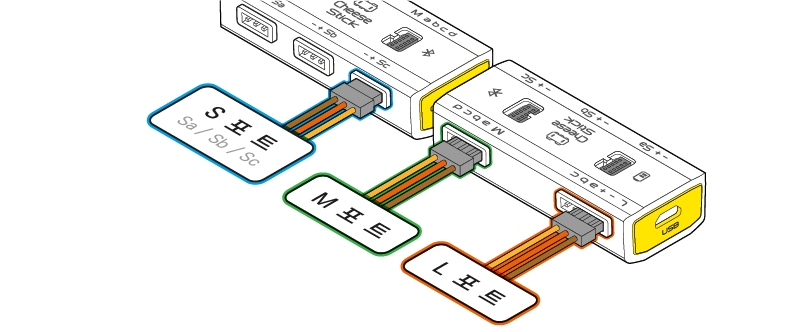
서보모터는 모든 포트에 연결 가능합니다. 연결한 포트를 바르게 설정해 주세요.
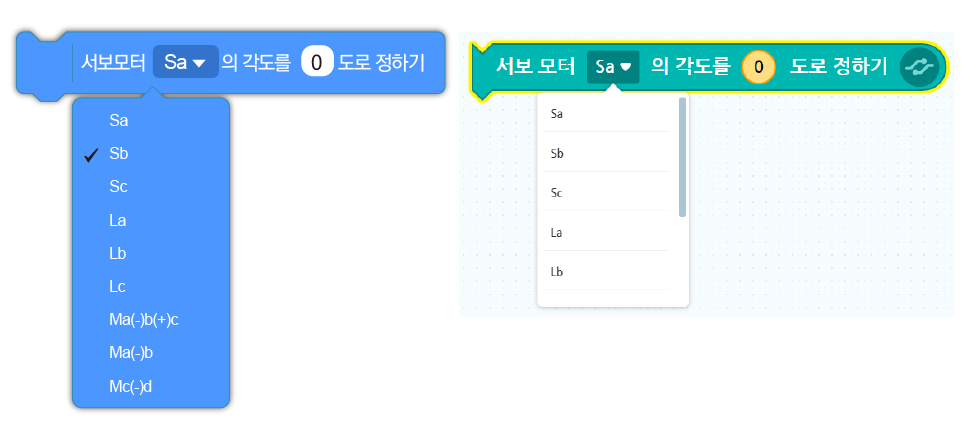
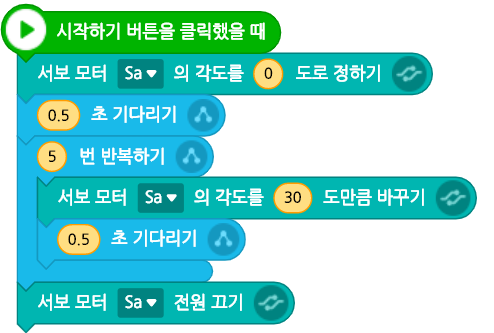
서보모터는 ‘0~180도’ 사이로 움직입니다.
위 코드는 시작하기를 클릭하면 서보 모터의 각도가 ‘0’으로 초기화됩니다.
5번 반복하기 블록을 활용하였으므로 ’30도’씩 5번 총 ‘150도’를 움직인 뒤 전원이 꺼집니다.
전기를 흐르게 하면 빛의 삼원색인 Red, Green, Blue를 조합하여 빛의 색을 표현해 줍니다.
다른 조명에 비해 에너지 효율이 높아 전구, 자동차 후미등 등 다양한 분야에서 사용되고 있습니다.


RGB LED의 빛이 강해 시력에 영향을 줄 수 있으니 밝기를 조절하며 사용하세요.
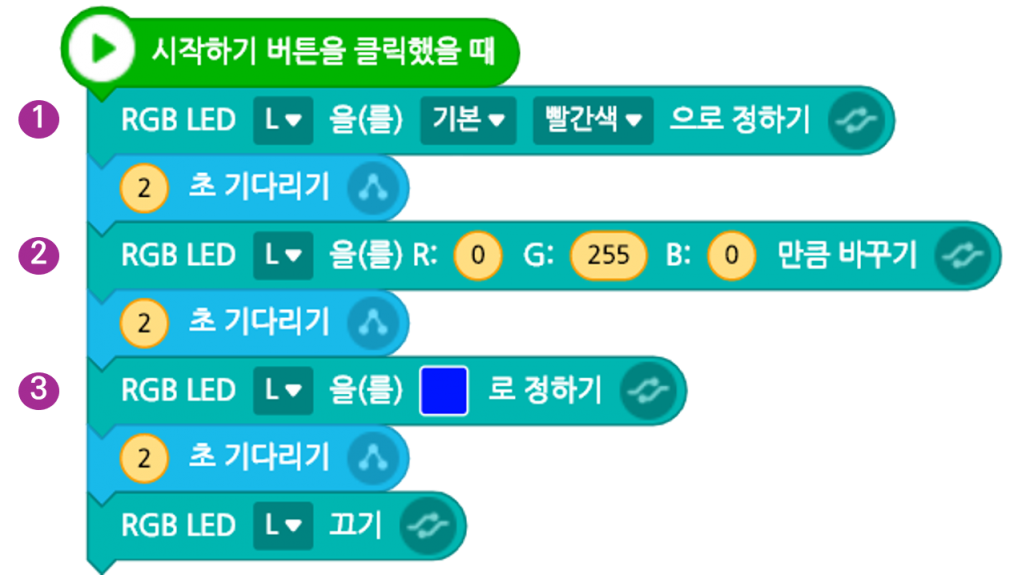
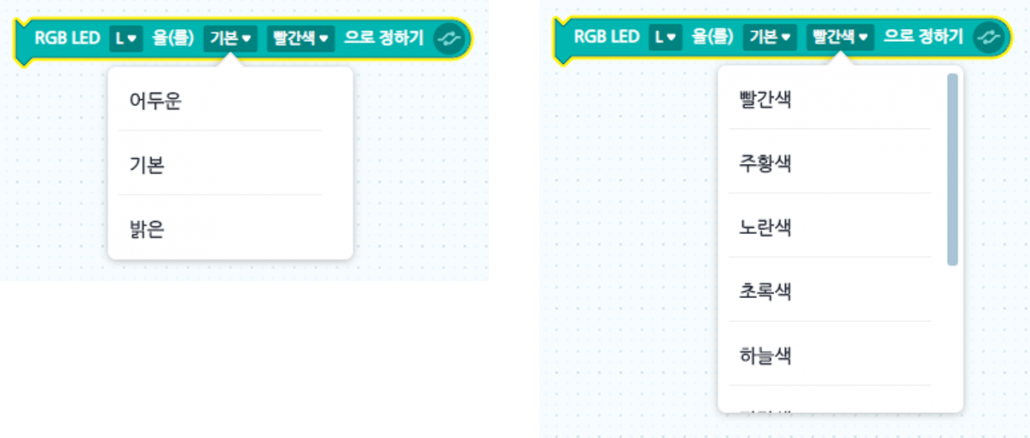
![]() 어두운, 기본, 밝은 중 빛의 밝기를 조절하고 9가지 색상 중 한 가지 색상을 선택해 RGB LED를 켭니다.
어두운, 기본, 밝은 중 빛의 밝기를 조절하고 9가지 색상 중 한 가지 색상을 선택해 RGB LED를 켭니다.
![]() RGB의 R, G, B 값을 ‘0~255’ 범위 내에서 각각 부여해 RGB LED를 켭니다.
RGB의 R, G, B 값을 ‘0~255’ 범위 내에서 각각 부여해 RGB LED를 켭니다.
![]() 색상 박스에서 원하는 색을 직접 선택해 RGB LED를 켭니다.
색상 박스에서 원하는 색을 직접 선택해 RGB LED를 켭니다.

색상을 정하는 블록들 사이에 ‘2초 기다리기’를 넣어 블록 별로 지정한 색상이 2초 동안 켜지도록 합니다.
RGB LED를 개별적으로 제어할 수 있어 재미있는 이미지를 연출할 수 있습니다.
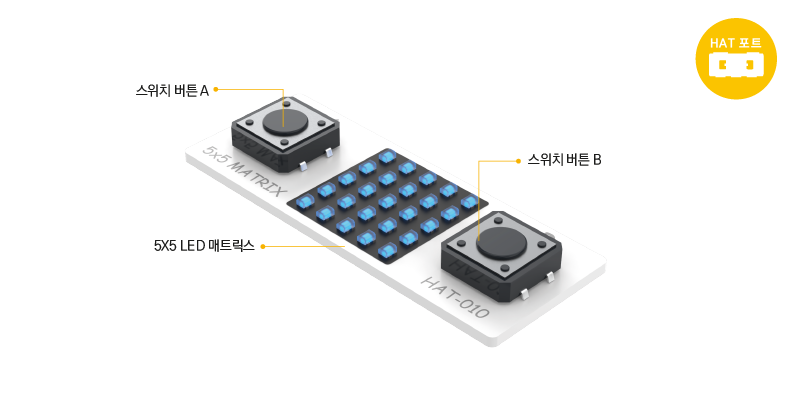

HAT 버튼 활용 기본 코드
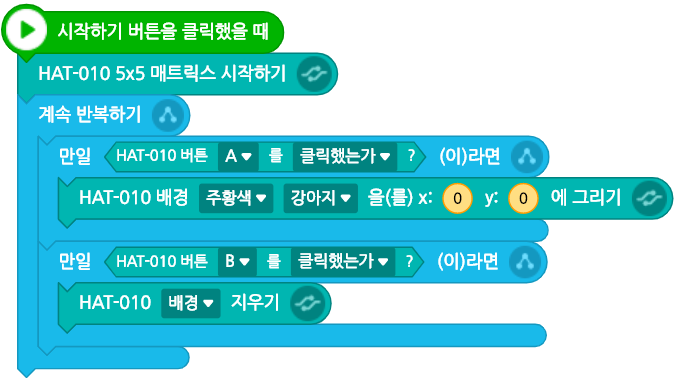
5×5 매트릭스의 HAT A버튼을 누르면 강아지가 나타나고 HAT B버튼을 누르면 사라지는 코드를 작성합니다.
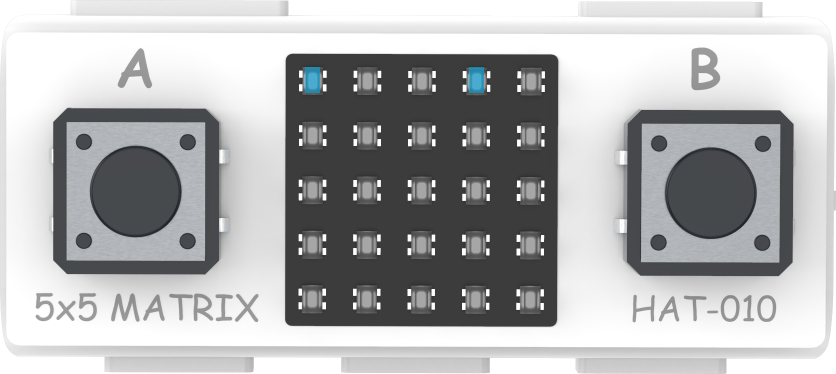
매트릭스 자릿값
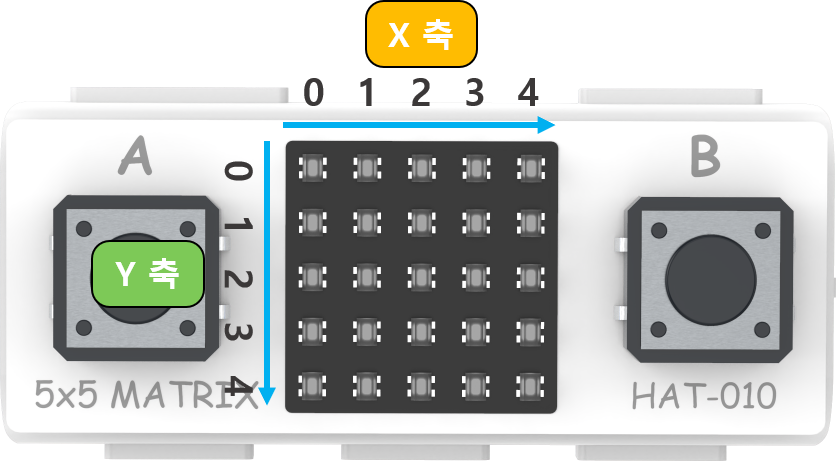
5×5 매트릭스의 LED들은 각각의 자릿값을 가집니다.
X축은 왼쪽에서 오른쪽으로 ‘0 ~4’값을 가지고 Y축은 위에서 아래로 ‘0 ~ 4’값을 가집니다.
그러므로 x: 2, y: 2로 위치를 지정하고 LED를 켜면 가장 가운데 LED에 불이 들어옵니다.
배경 활용 코드
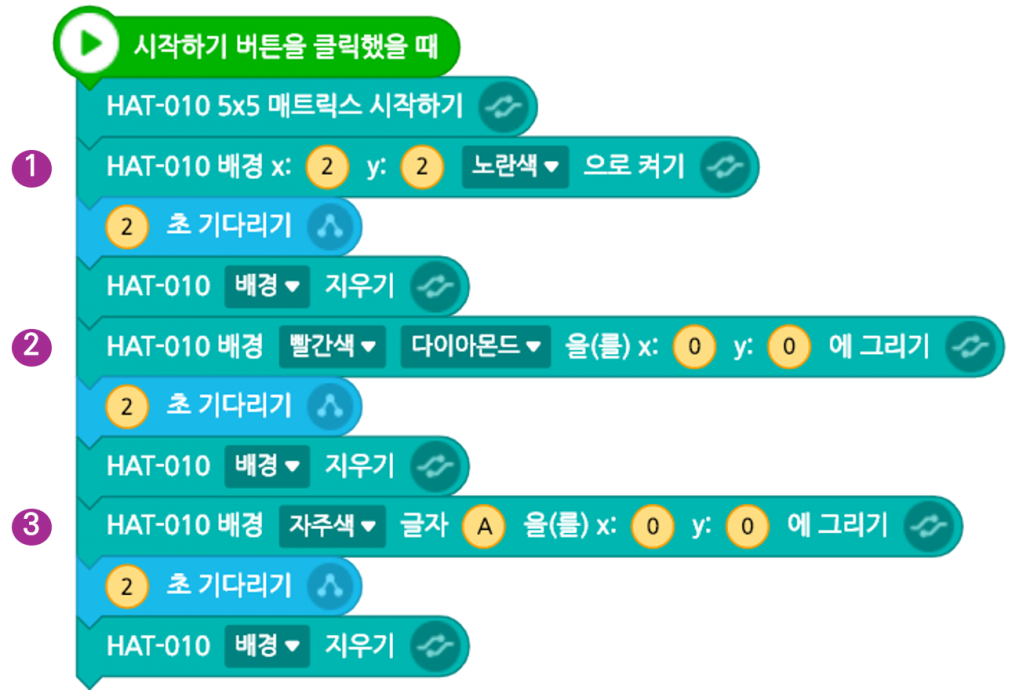
5×5 매트릭스를 사용하기 위해서는 항상 ‘5×5 매트릭스 시작하기’블록을 가져와야 합니다.
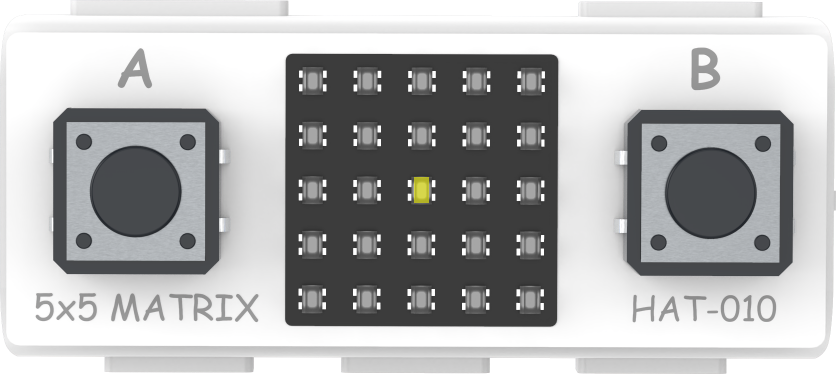
![]() 여기서 x: , y: 는 불이 켜질 LED의 위치를 의미합니다. x: 2, y: 2는 매트릭스의 가운데 지점을 의미하고 해당 칸의 LED가 노란색으로 켜집니다.
여기서 x: , y: 는 불이 켜질 LED의 위치를 의미합니다. x: 2, y: 2는 매트릭스의 가운데 지점을 의미하고 해당 칸의 LED가 노란색으로 켜집니다.
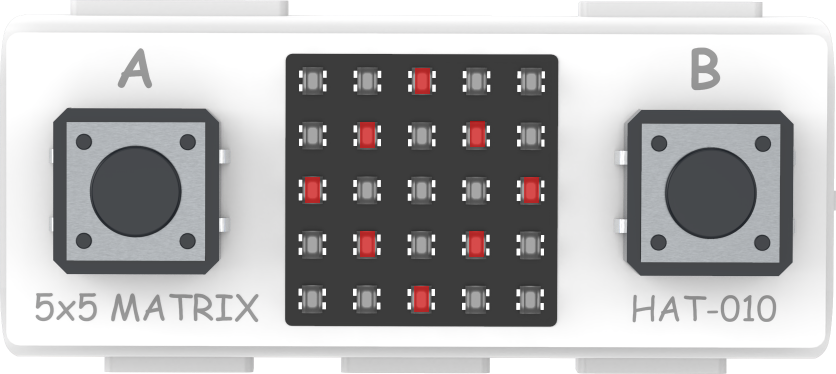
![]() ‘~을 x: , y: 에 그리기’에서는 x: , y: 의 값이 위치가 아닌 모양이 나타날 범위를 의미합니다.
‘~을 x: , y: 에 그리기’에서는 x: , y: 의 값이 위치가 아닌 모양이 나타날 범위를 의미합니다.
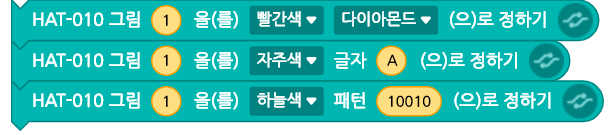
x: 0, y: 0값을 주면 5×5 매트릭스의 전체 영역을 범위로 하며 빨간색 다이아몬드 모양이 나타납니다.
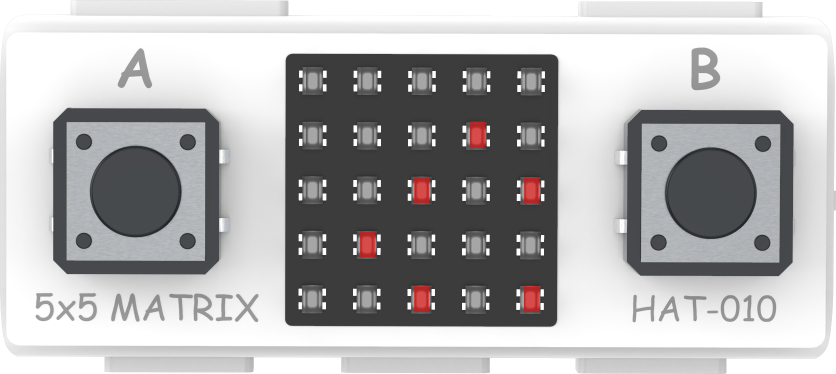
x: 1, y: 1으로 범위를 주면 아래와 같이 켜집니다.
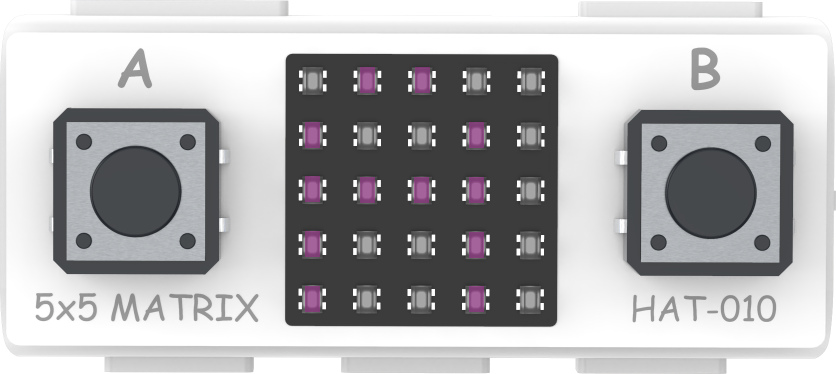
![]() 원하는 글자를 지정한 색으로 나타냅니다. 이번에는 자주색 대문자 A가 전체 영역에 걸쳐 나타납니다.
원하는 글자를 지정한 색으로 나타냅니다. 이번에는 자주색 대문자 A가 전체 영역에 걸쳐 나타납니다.
‘2초 기다리기’를 사용해 2초 동안 해당 모양이나 글자를 나타냅니다.
‘배경 지우기’를 블록 사이사이에 넣어 주어야 LED가 이전에 입력한 값의 모양과 겹쳐서 켜지지 않습니다.

패턴을 활용해서 LED를 켤 수도 있습니다.
이 때 1, 0 두 숫자를 활용하는데 1은 켜짐, 0은 꺼짐을 의미합니다.
위 블록의 경우 LED 가장 윗 줄(Y축의 값 0)의 첫 번째와 네 번째 LED가 하늘색으로 켜집니다.
여러 줄의 패턴을 지정하고 싶으면 아래와 같이 ‘/’를 이용해 구분해서 표현할 수 있습니다.
![]()
패턴을 위처럼 지정할 경우 Y축의 0~2번째 줄, 가장 위쪽부터 3번째 줄까지 입력한 모양대로 LED가 켜집니다.
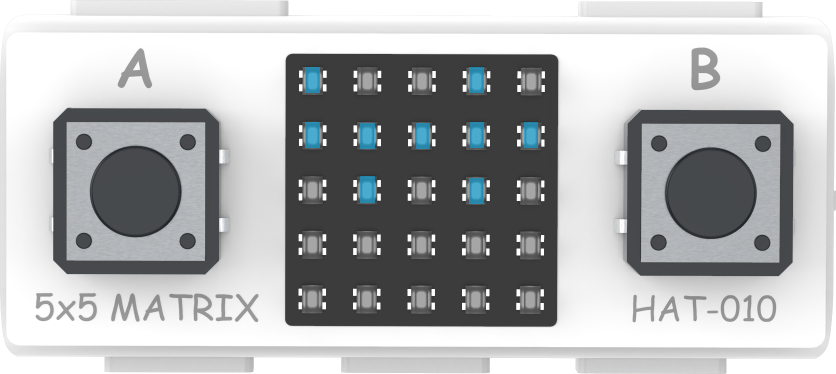
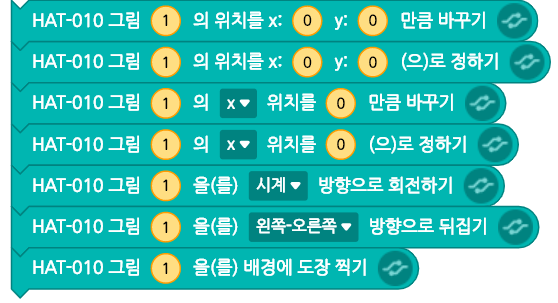
그림 활용 코드
5×5 매트릭스는 배경이 아닌 그림으로 LED를 켤 수도 있습니다.
그림은 엔트리에서 오브젝트의 모양을 설정하는 것과 같은 개념이라고 생각하면 됩니다.
위의 코드를 실행하면 LED상에서는 배경으로 실행한 것과 같은 결과가 나옵니다.
그러나 이는 배경이 아닌 오브젝트처럼 사용되는 것이므로 아래의 블록들을 활용해 위치와 방향을 조정할 수 있습니다.
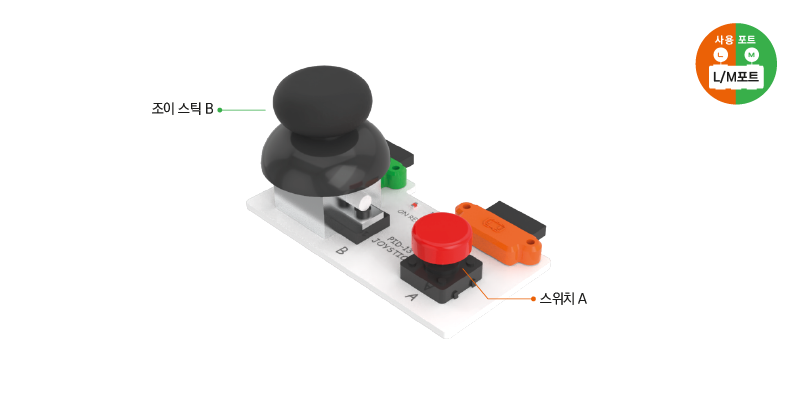
수동 조작하는 입력 장치로 레버와 스위치를 조작하여 제어할 수 있습니다.
조이스틱은 전투기나 크레인 조종, 제조 및 조립 라인, 드론의 원격 조종 등 많은 분야에서 사용되고 있습니다.

좌우로 움직이기
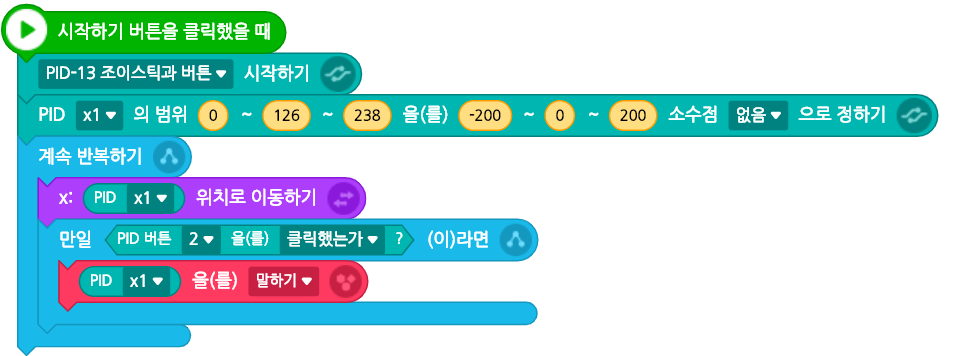
PID x1값은 조이스틱을 좌우로 움직일 때 변합니다.
x1의 범위는 대략적으로 ‘0 ~ 126 ~ 238’의 값을 가집니다.
값들은 실행할 때마다 조금씩 바뀌므로 최소, 중간, 최대 값은 여러분이 조이스틱을 움직여 가며 찾아낼 수 있습니다. (오차범위 ±20)
이 범위를 실행 화면 위에서 엔트리봇이 좌우로 움직일 수 있는 범위인 ‘-200 ~ 0 ~200’으로 정합니다.
실행 화면 위에서 엔트리봇이 이동할 범위를 지정하는 것이므로 이 값 또한 여러분들이 원하는 값으로 설정하면 됩니다.
‘만일 ~ 이라면’ 조건문과 ‘말하기’블록을 활용해 PID 버튼 2(빨간 버튼)를 누르면 x 좌표값의 위치를 확인할 수 있도록 했습니다.
상하로 움직이기
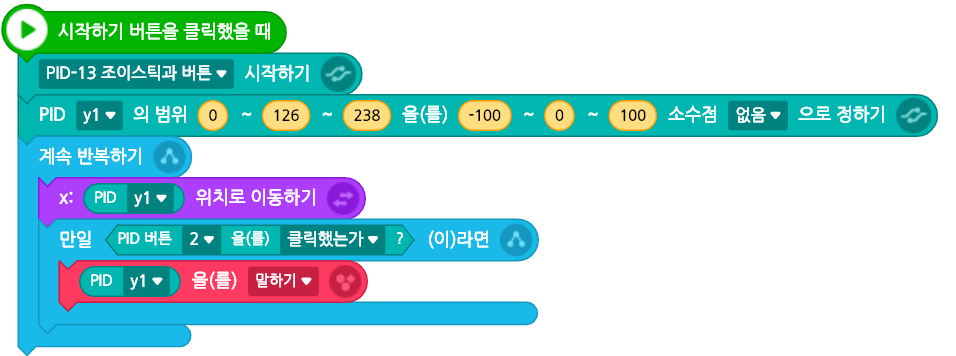
PID y1값은 조이스틱을 상하로 움직일 때 변합니다.
따라서 상하로 움직이기 코드는 좌우로 움직이기 코드와 같게 작성한 후 PID x1을 PID y1으로 변경해주었습니다.
상하좌우로 움직이기
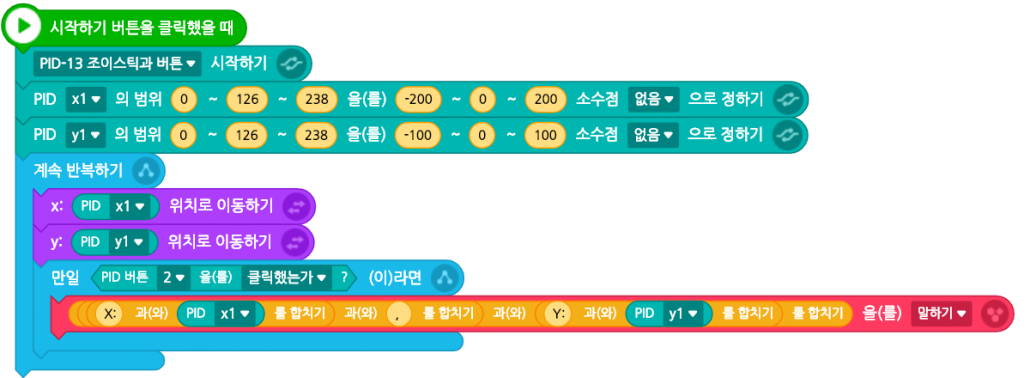
좌우 이동 코드와 상하 이동 코드를 합쳐서 상하좌우로 엔트리봇을 움직이는 코드를 작성합니다.
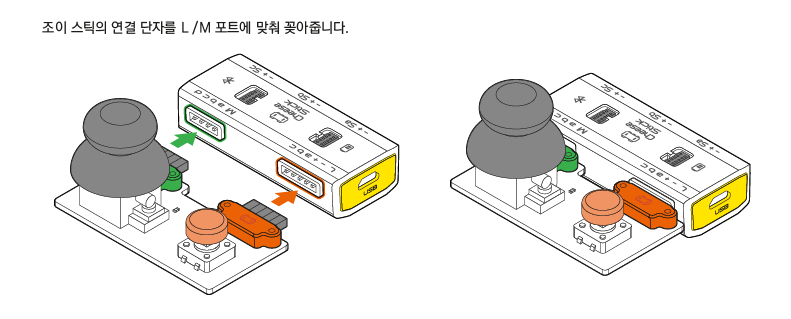
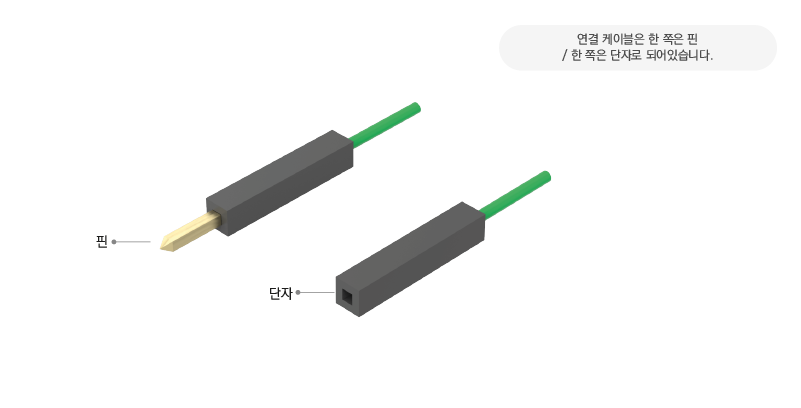
연결 케이블은 암수(단자와 핀)로 구성된 점퍼 케이블입니다. 부품을 연장/연결 하거나, 케이블 자체를 코딩에 활용할 수 있습니다.
부품을 연장해서 사용할 경우, 연결한 포트와 사용하는 부품을 잘 확인해 설정해 주세요.

케이블 자체를 코딩에 활용하려면, ‘메이키’입력으로 설정해 사용할 수 있습니다.

기타 장치를 포트에 연결해 주는 어댑터 입니다.
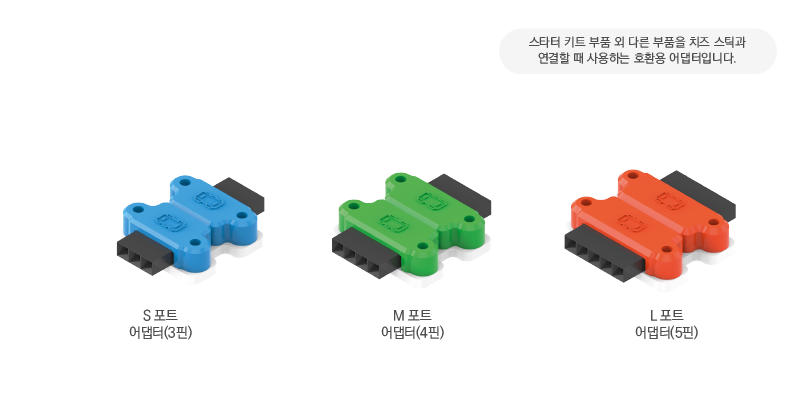
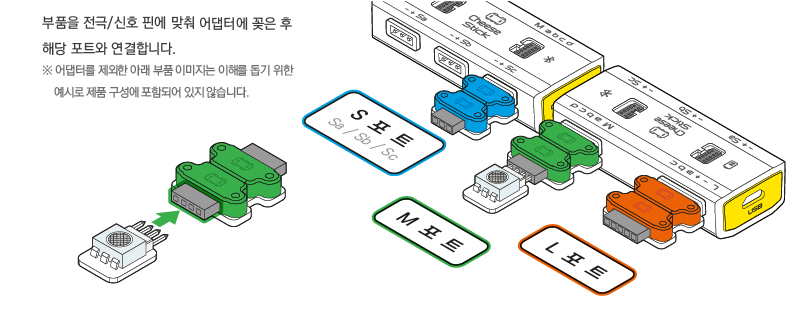
※ 타사 부품의 사용 중 발생한 치즈 스틱의 고장은 제품 보증이 되지 않으므로 주의하여 사용하시기 바랍니다.
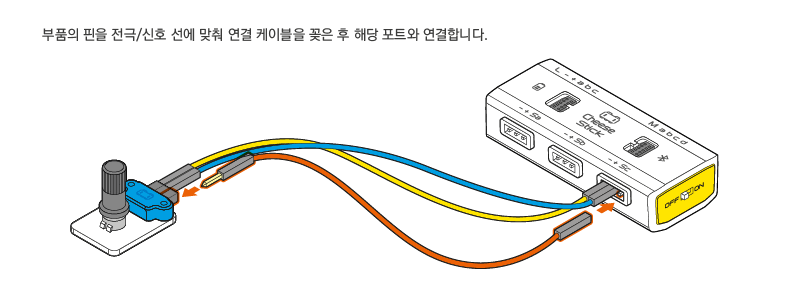
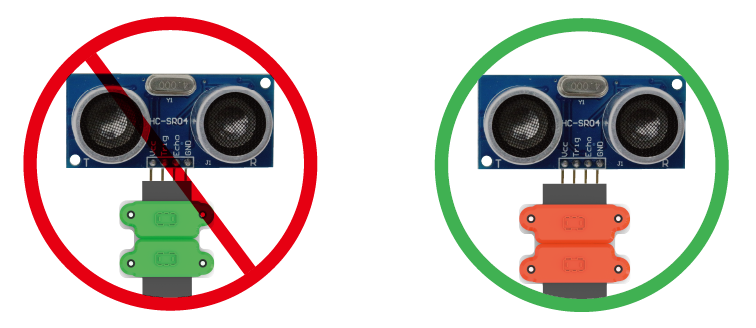
※ 부품의 배열 순서가 치즈 스틱과 다른 경우 연결 케이블을 이용하여 개별적으로 연결해야만 사용할 수 있습니다.
연결 핀 수가 같아도 전극과 신호 선의 배열이 다를 수 있습니다. 타사 제품의 전극과 신호 선의 배열은 구입하신 제품의 제조사에 문의해 주시기 바랍니다.
(상기 이미지는 예시입니다.)

 전갈이 지나가요!
전갈이 지나가요!