햄스터 AI 카메라와 치즈 스틱, 스크래치의 몸 찾기를 활용해 보아요.
스크래치의 몸찾기 기능으로 사람이 다가오는 것을 감지해요.
서보모터와 5×5 LED 매트릭스로 망을 봐줘요.


부품을 준비해 주세요.
| 필요 재료 | 수량 |
|---|---|
| 치즈 스틱 | 1개 |
| 햄스터 AI 카메라 | 1개 |
| 5×5 LED 매트릭스 | 1개 |
| 서보 모터 | 1개 |
| USB 동글 | 1개 |
| 무선 네트워크 어댑터 | 1개 |
| 컴퓨터 | 1대 |
만들기를 해보아요.

컵 위쪽에 십자로 표시한 뒤 칼로 잘라 빨대가 들어갈 구멍을 만들어 줍니다.

컵 양 옆 두곳도 표시한 후 잘라 주어 빨대가 나올 자리를 만들어 줍니다.

빨대를 위 사진과 같은 방향으로 꽂아 주세요.
컵에 꽂은 빨대 세 개의 끝을 모아 테이프로 붙여줍니다.

가운데 빨대를 잡아 당겨 빨대의 움직임을 확인하세요.

가운데 빨대를 잡아당기면 컵 안 쪽 빨대는 컵 안으로 들어가고 양 옆의 빨대는 위로 올라갑니다.
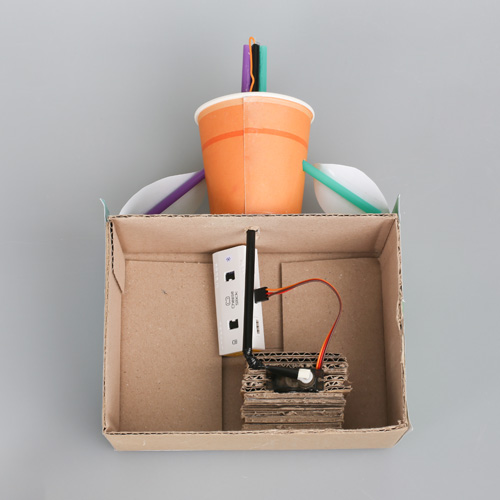
컵을 박스에 붙이고 꾸며준 후 아래로 나온 긴 빨래의 끝을 서보 모터와 연결합니다.

서보모터의 각도를 조정해 빨대를 아래로 당겨줍니다.
서보모터가 제대로 동작하면 컵 속 빨대에 카메라를 붙여 만들기를 완성합니다.
하드웨어를 준비해요.
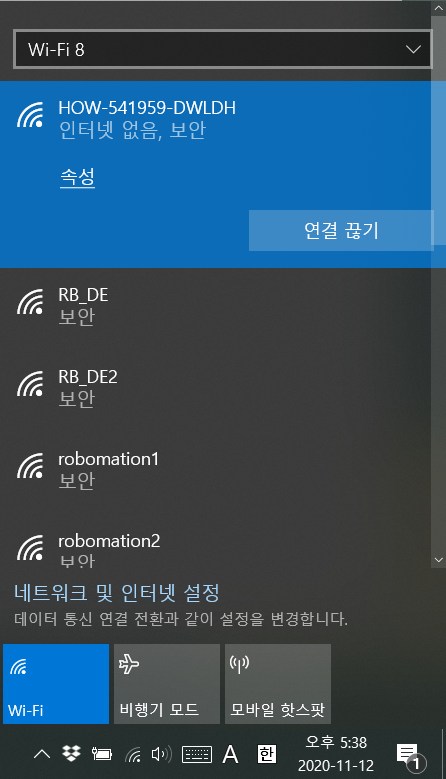
1. 햄스터 AI 카메라를 무선 네트워크 어댑터에 연결합니다.

2. 로봇 코딩 소프트웨어에서 스크래치3를 선택해 접속합니다.
코딩을 해요.
알고 가기
코딩을 시작하기 전 스크래치에서 카메라를 활용하는 방법은 아래 버튼을 클릭하면 이동하는 페이지에서 확인합니다.
코딩 하기
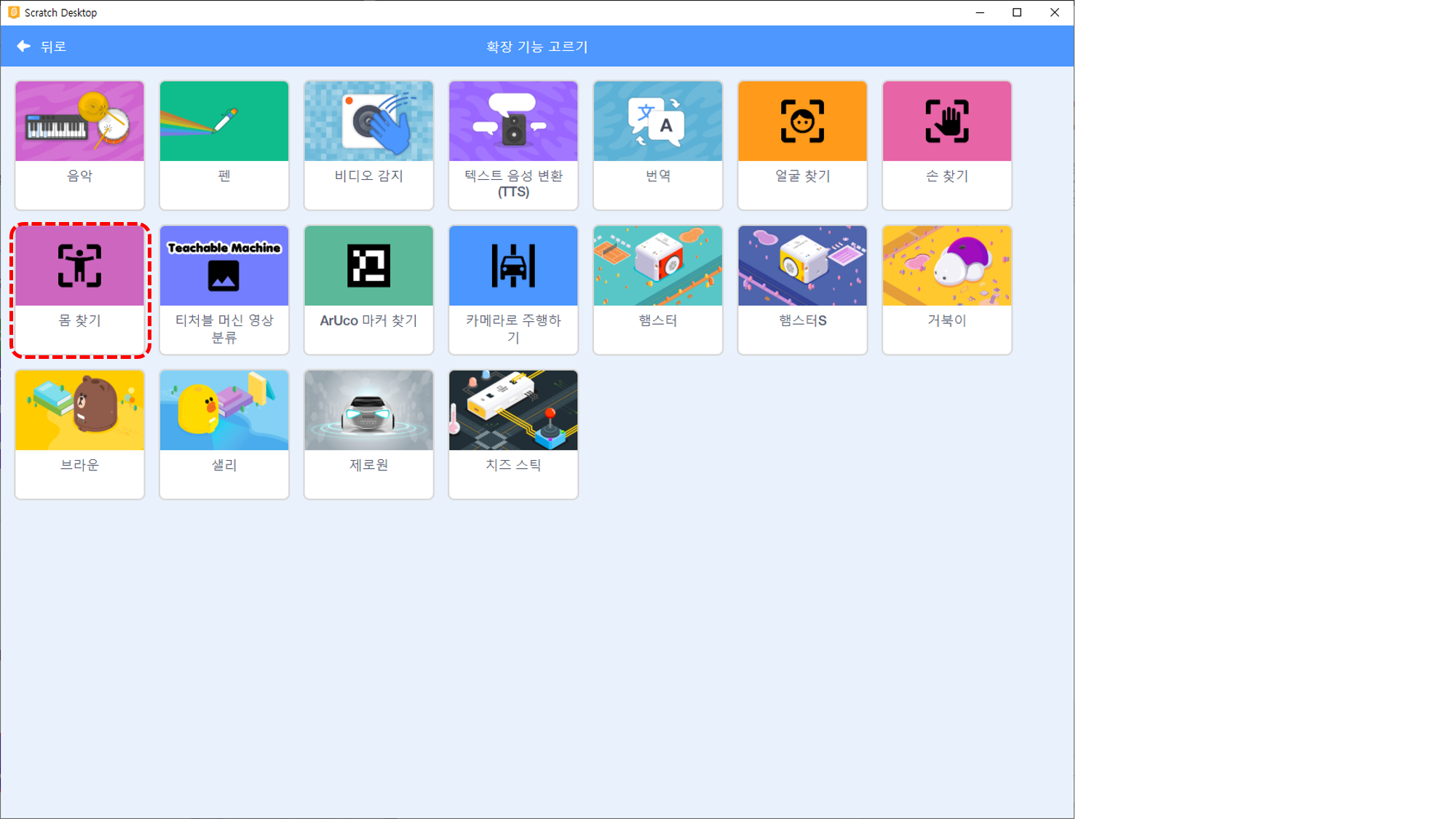
1. 코드에 사용할 블록을 추가합니다.
확장 기능 추가하기![]() 에서 ‘몸 찾기’를 추가합니다.
에서 ‘몸 찾기’를 추가합니다.
* 아래의 블록들은 연결해서 작성해야 하지만 설명을 위해 분리해 놓았어요.
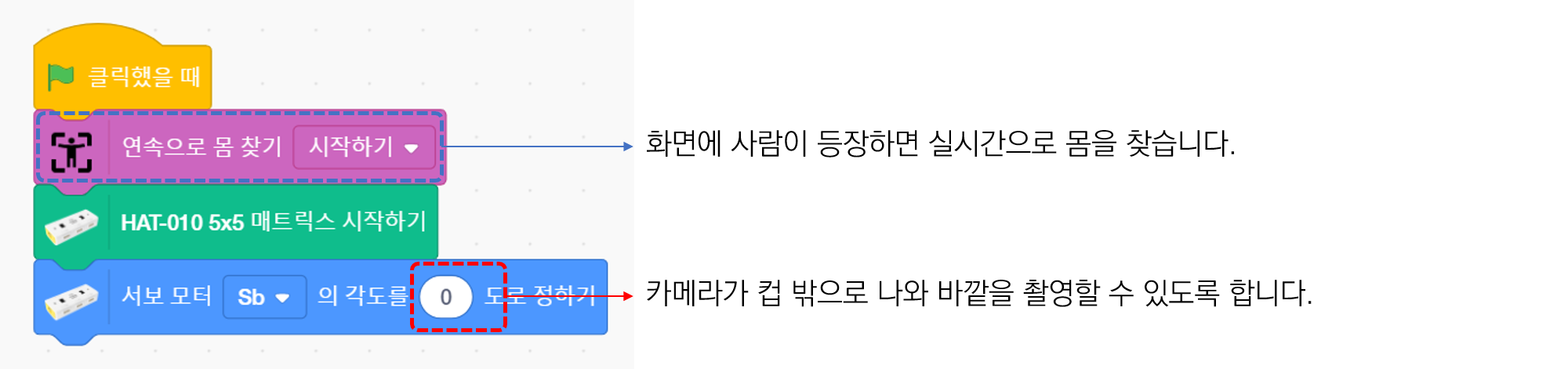
2. 클릭했을 때 동작할 코드를 작성합니다.
* 이전에 작성한 코드를 다시 실행할 때에는 코드 실행 전  블록을 클릭해 모델을 불러옵니다.
블록을 클릭해 모델을 불러옵니다.
몸 찾기를 시작하고 연결된 부품의 값을 초기화하는 블록을 가져와 코드를 작성합니다.
3. 몸을 찾았을 때 동작을 수행하는 코드를 작성합니다.
실시간으로 신체의 좌표 값을 감지해야 하므로 ‘무한 반복하기’ 블록을 사용합니다.
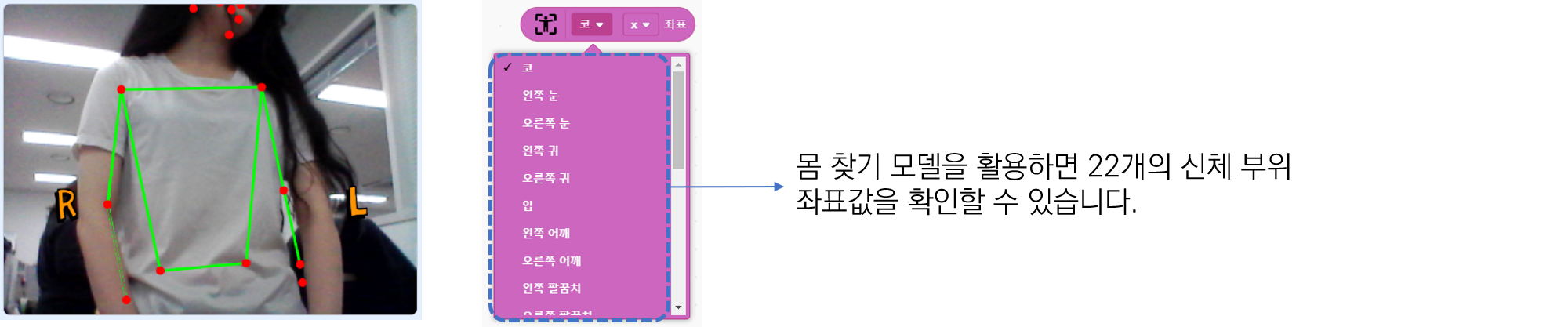
사람이 얼마나 가까이 다가왔는가를 감시하기 위해서 특정 신체 부위의 좌표값이 지정한 영역 안으로 들어왔는가를 감지하는 코드를 작성합니다.
몸 찾기를 시작하면 아래와 같이 실행 화면에 나타난 신체 위에 점과 선으로 감지 결과가 나타납니다.
조건문을 사용해 신체 부위를 감지할 범위를 지정합니다.
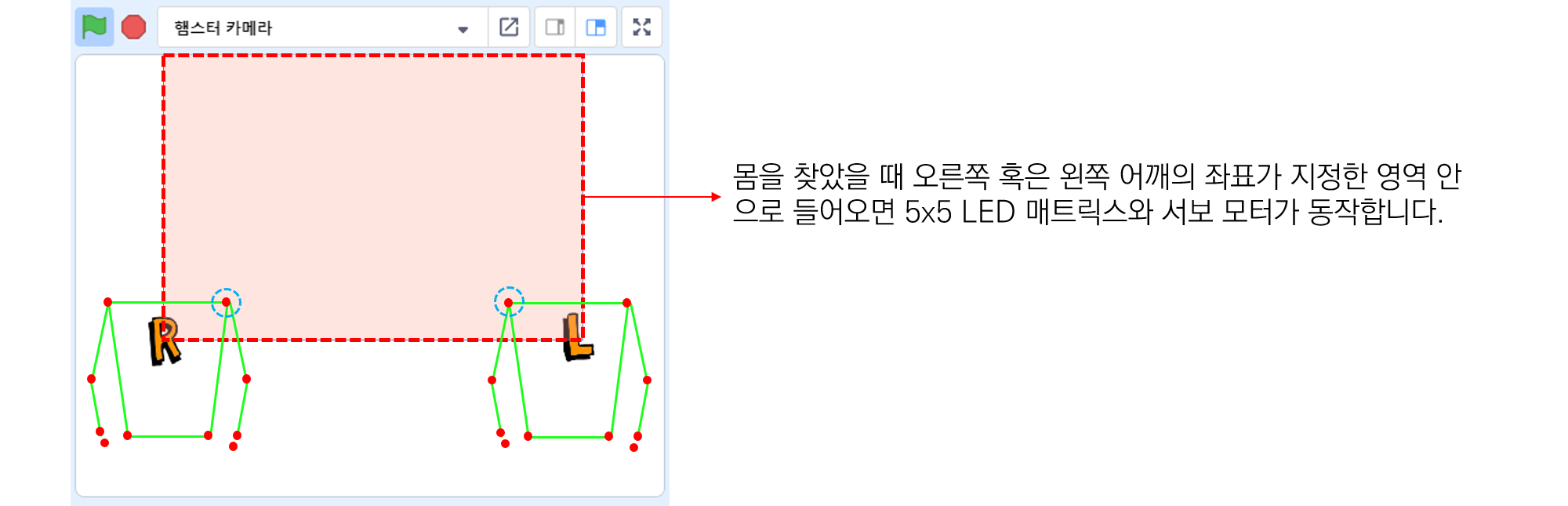
지정한 범위 내로 어깨가 감지되면 5×5 LED 매트릭스가 빨갛게 변하고 카메라가 컵 속으로 숨도록 서보 모터의 각도를 조정합니다.

4. 몸 찾기를 다시 시작하는 코드를 작성합니다.
한 번 탐지가 끝난 후 다시 탐지를 할 수 있도록 스페이스키를 누르면 값이 초기화 되도록 합니다.

치즈 스틱이 망을 얼마나 잘 보는지 확인해 보아요!
응용하기
다른 신체 부위의 좌표값도 활용하여 여러분 만의 코드를 작성해 보아요.
