Hamster Robot Traffic Sensor
햄스터와 미로판, 장애물, 스크래치로 길찾기를 해요.
미로판에 흰 색 테이프를 붙여 말판을 만들고 햄스터의 바닥 센서를 활용하여 흰 선을 감지해 길을 찾아요.
근접 센서로 장애물을 발견하면 오른쪽으로 돌아 피해갑니다.


부품을 준비해 주세요.

| 필요 재료 | 수량 |
|---|---|
| 햄스터 또는 햄스터S | 1대 |
| 그리퍼용 컵 | 장애물을 놓고 싶은 만큼 준비합니다. 컵 외에 다른 물건을 써도 됩니다. |
| 미로판 | 4개(흰 테이프를 격자 모양으로 붙여서 준비합니다.) |
| USB 동글 | 1개 |
| 컴퓨터 | 1대 (로봇 코딩 소프트웨어 설치 필요) |
하드웨어를 준비해요.

1. 컴퓨터 USB 포트에 USB 동글을 꽂은 후 치즈 스틱 본체의 전원을 켜 페어링 하세요.

2. 로봇 코딩 소프트웨어를 실행한 후 프로그래밍 할 프로그램을 선택해 주세요.

3. 자, 이제 프로그램을 시작합니다!
프로젝트를 알아봐요.
프로젝트 소개
2021년 하반기에 진행한 로보메이션과 화랑청소년재단(Hwarang Youth Foundation) 인턴십 참여 학생의 작품입니다.
화랑청소년재단은 미국을 중심으로 세계에 거주하는 한인 청소년들이 활동하는 비영리단체 입니다.
이번 인턴십에는 미국 거주 한인 고교생들이 참여해 좋은 성과를 내 주었습니다.
여러분들에게도 몇 가지 프로젝트를 소개해 드릴게요!
아래 프로젝트는 캘리포니아에 살고 있는 Teddy chun학생이 만든 프로젝트 입니다.
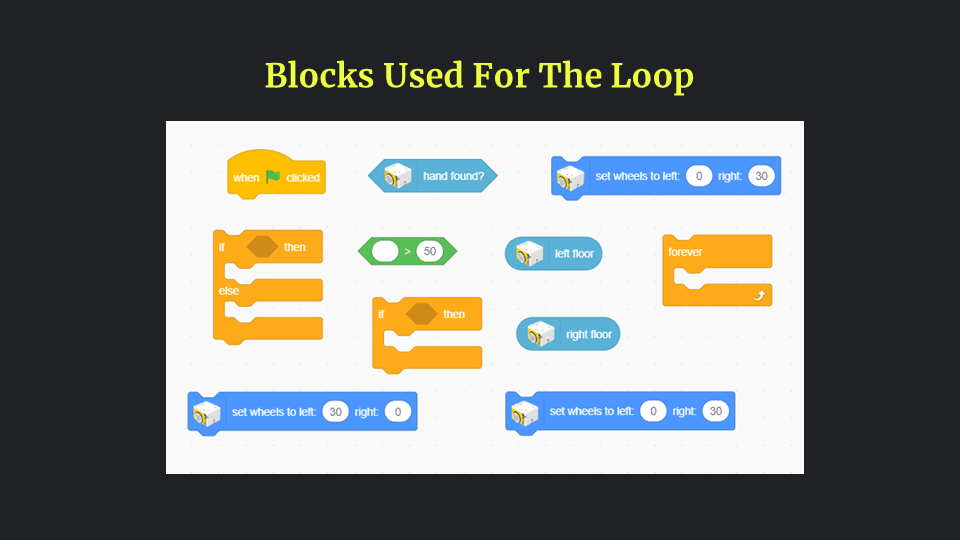
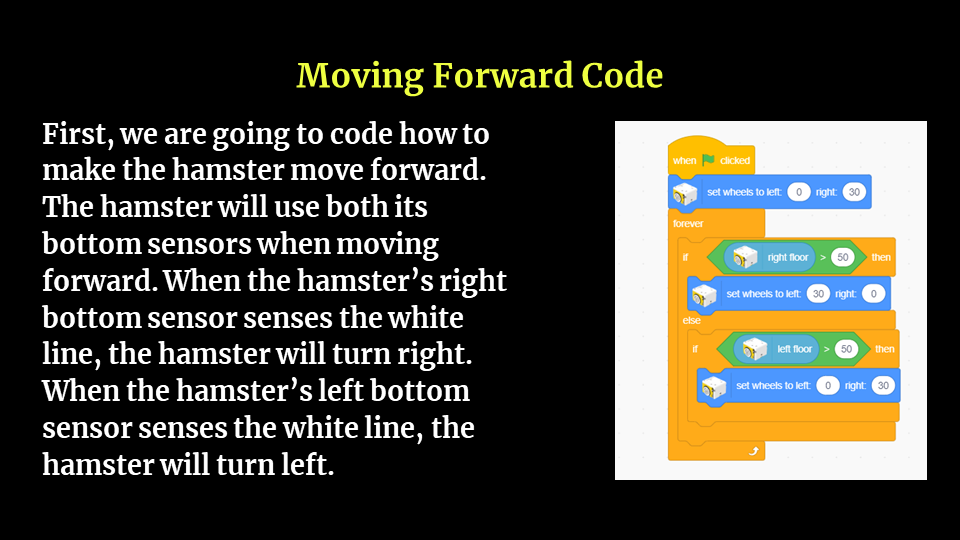
이 프로젝트에서는 라인 따라가기 블록을 사용하지 않고 바닥 센서의 값을 직접 활용해 흰 선을 따라 움직입니다.
근접 센서로 장애물을 감지하면 오른쪽으로 돌아 경로를 바꾼 후 바닥 센서로 흰 선을 찾은 뒤 따라갑니다.

프로젝트 내용

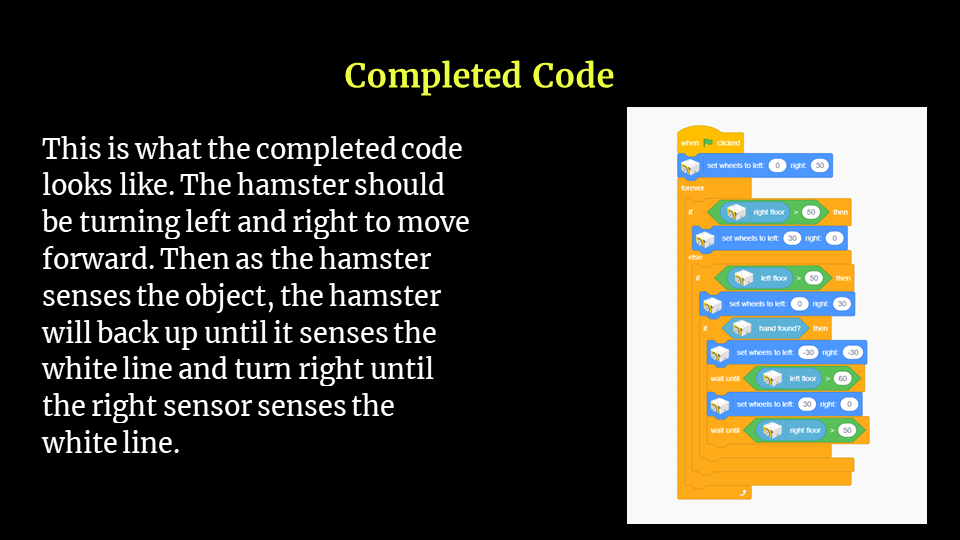
오른쪽 상단의 코드를 다운 받아 미로판 위에서 햄스터가 얼마나 길을 잘 찾아가는지 직접 확인해 보세요.

