Hamster AI Soccer 는 햄스터 AI 카메라가 노란 로봇 볼과 햄스터 로봇 위 아루코 마커의 위치를 추적해
로봇의 움직임을 제어하고 골 득점 상황을 카운트하는 자율 행동 로봇 축구 프로그램입니다.
스스로 움직이는 똑똑한 햄스터 로봇과의 대결이 가능하고 득점 현황까지 알려주는 Hamster AI Soccer!
아래 버튼을 눌러 실행 프로그램을 다운로드 받아 로봇 축구에 도전해보세요.
새로운 액세서리 슈터도 활용 가능해요!

A, B팀 표시와 햄스터에 부착하는 아루코 마커 도안만 다운 받으실 분은 아래 버튼을 클릭해 주세요.
※ 해당 프로그램은 로보메이션의 제품을 활용해 대학생들이 개발하여 체험용으로 배포한 프로그램입니다.
따라서 본 프로그램의 사용법이나 오류에 대한 문의는 받고 있지 않습니다.

부품을 준비해 주세요.

축구장 도안을 포함한 인공지능 경기장을 조립합니다.
| 필요 재료 | 수량 |
|---|---|
| 햄스터 또는 햄스터S | 4대 |
| 햄스터AI카메라 | 1대 |
| USB 동글 | 최대 4개 |
| 무선 네트워크 어댑터 | 1대 or 2대 (카메라를 연결하기 원하는 PC수만큼 준비합니다. 노트북처럼 직접 Wi-Fi 연결이 가능한 PC는 준비하지 않아도 됩니다.) |
| 인공지능 경기장 키트(미로판 포함) | 1세트 |
| 아루코 마커 스티커 | 1세트 (도안을 출력하여 사용해도 됩니다.) |
| 컴퓨터 | 1대 or 2대 |
| USB 허브 | 1개 (USB 포트가 최소 3개 이상 필요하므로 확장을 위해 준비합니다.) |
| 슈터(슈터모드 사용 시) | 4개 |
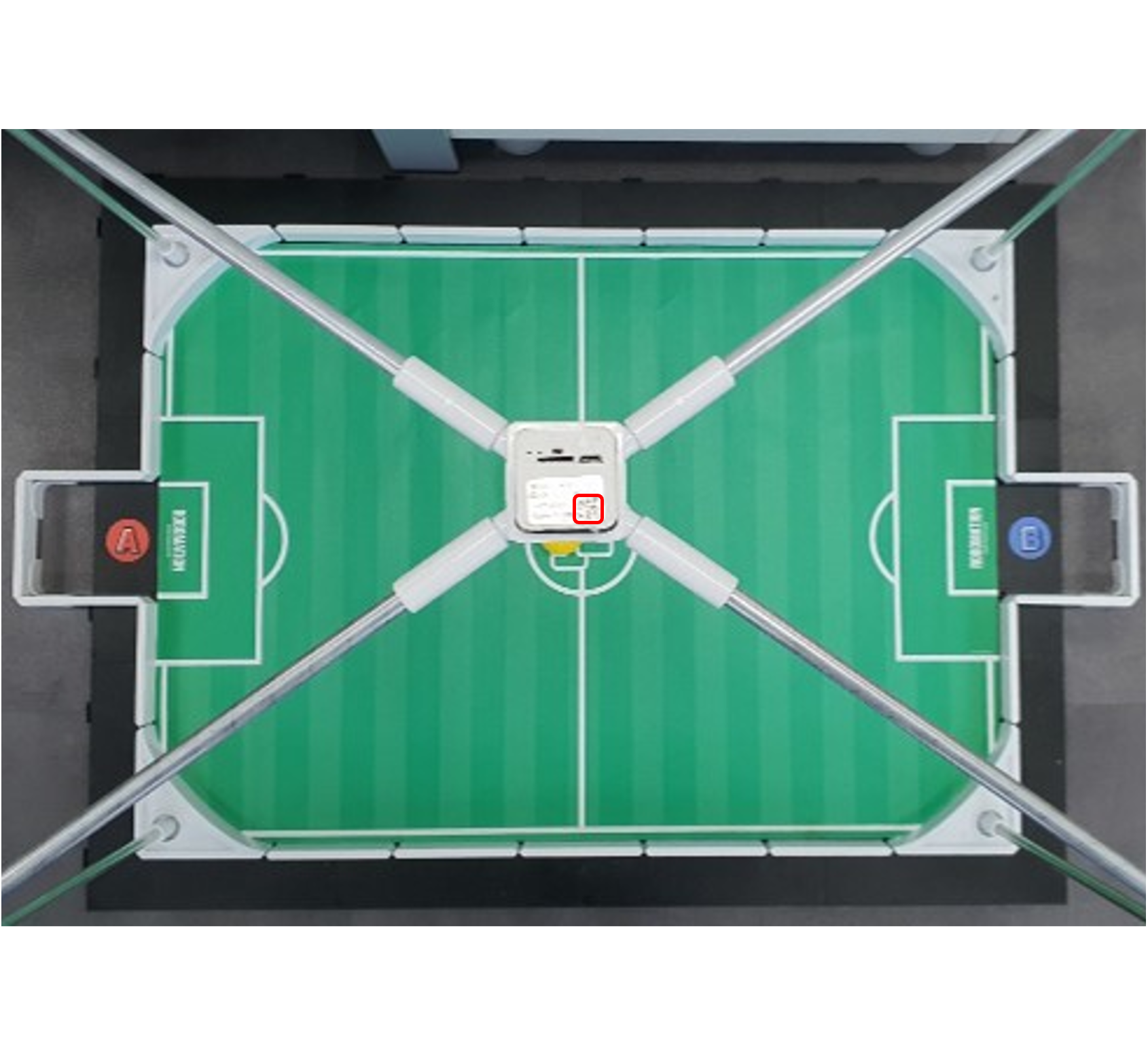
1. 경기장을 사진과 같이 조립합니다. 햄스터 AI 카메라 후면의 QR 마커를 기준으로 왼쪽이 A팀, 오른쪽이 B팀이 되도록 스티커를 부착합니다.
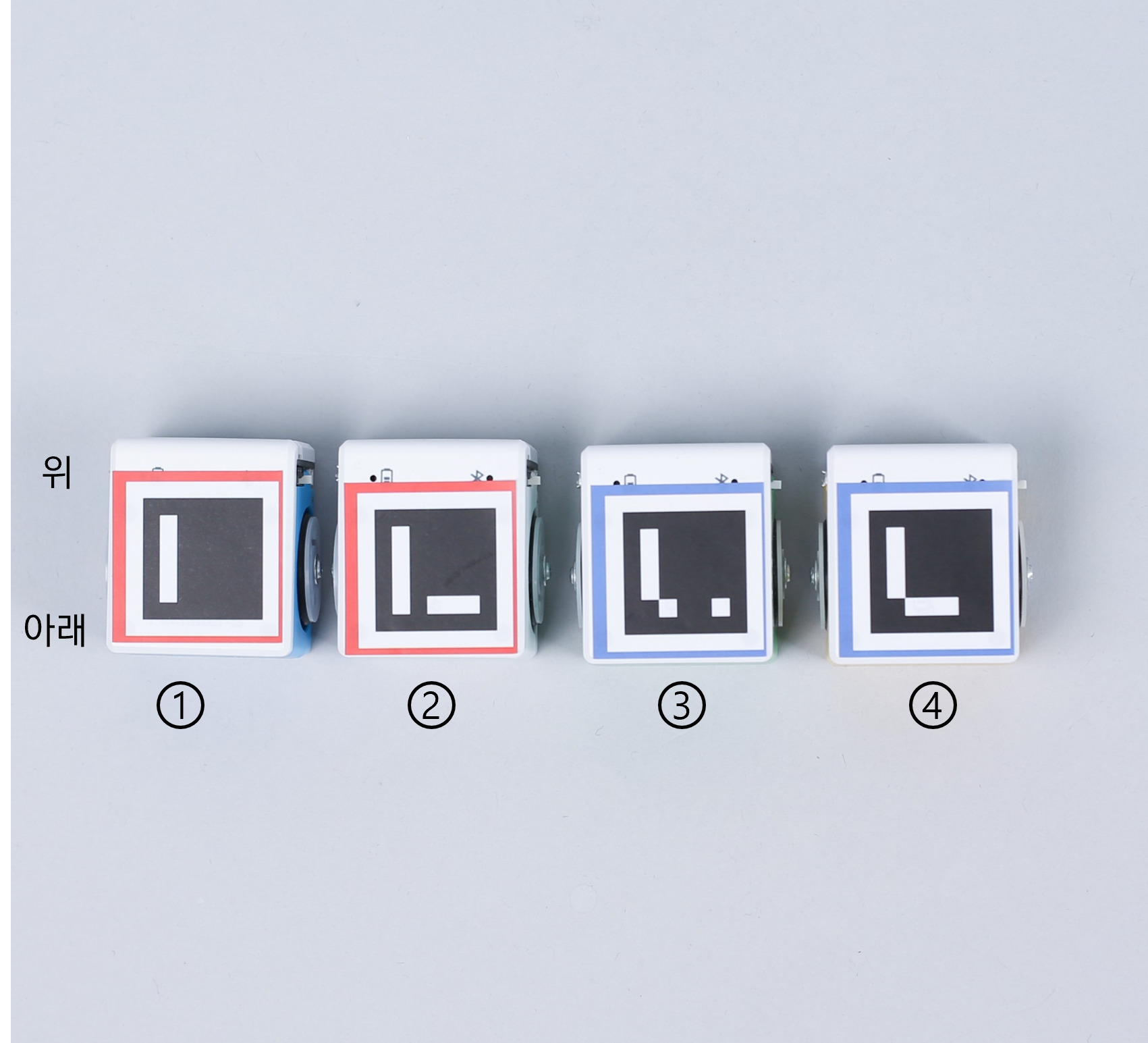
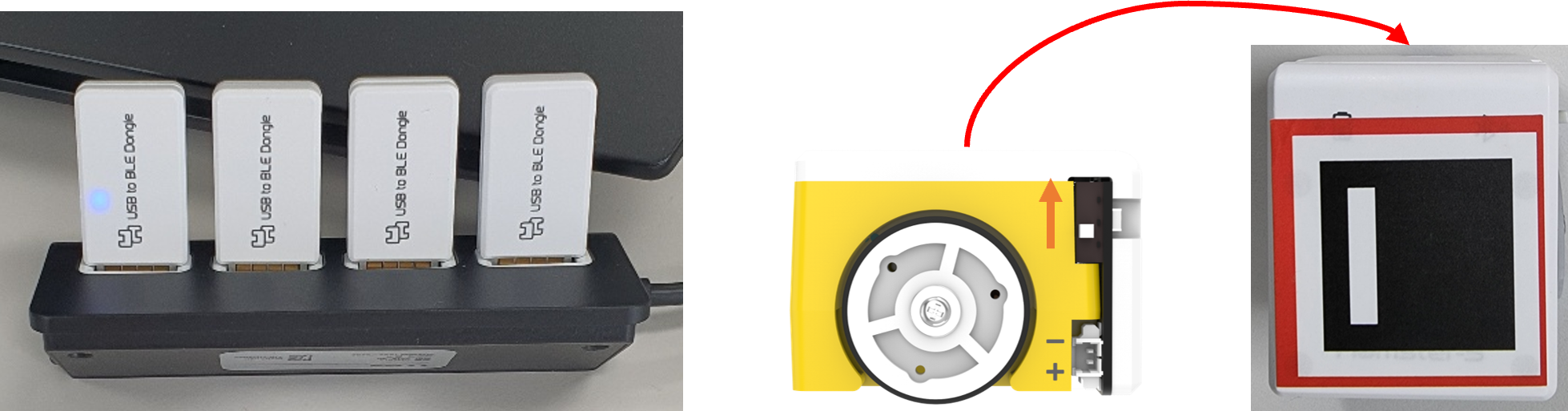
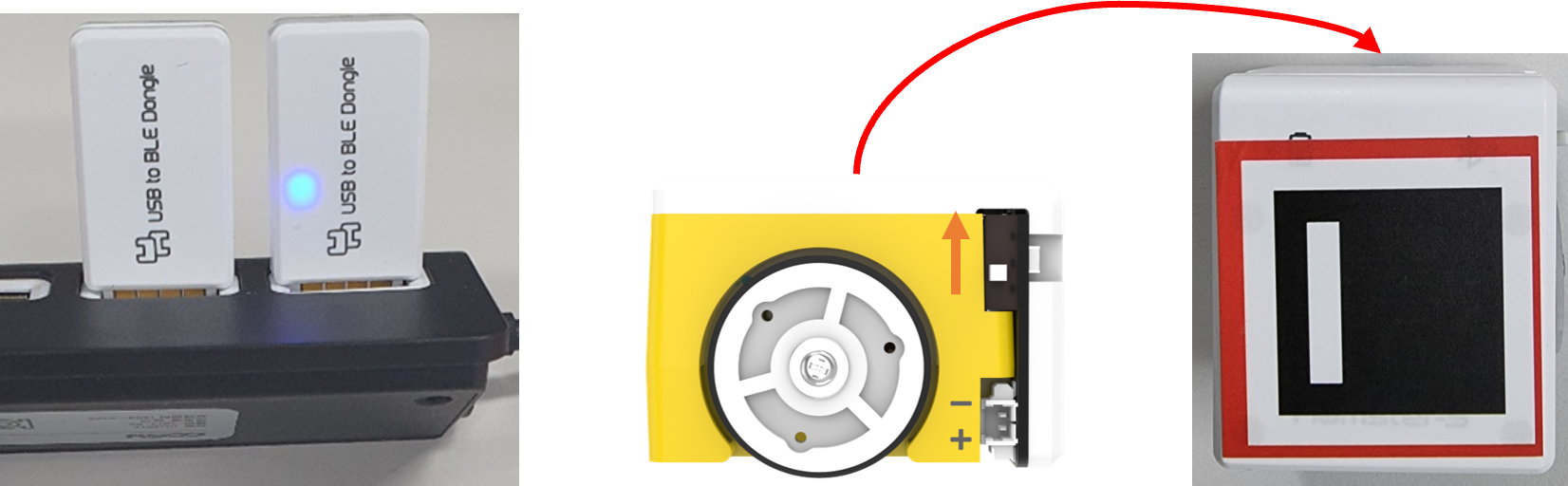
2. 햄스터 로봇 위에 아루코 마커를 붙여 준비합니다. 마커의 방향이 중요하므로 위 아래 방향을 유의하여 사진과 같은 모양으로 붙여주시기 바랍니다.

3. PC와 연결을 원하는 햄스터 로봇의 수만큼 USB 동글을 포트에 꽂아 준비합니다.
이 때 로봇은 꼭 전원을 끈 상태로 준비합니다.
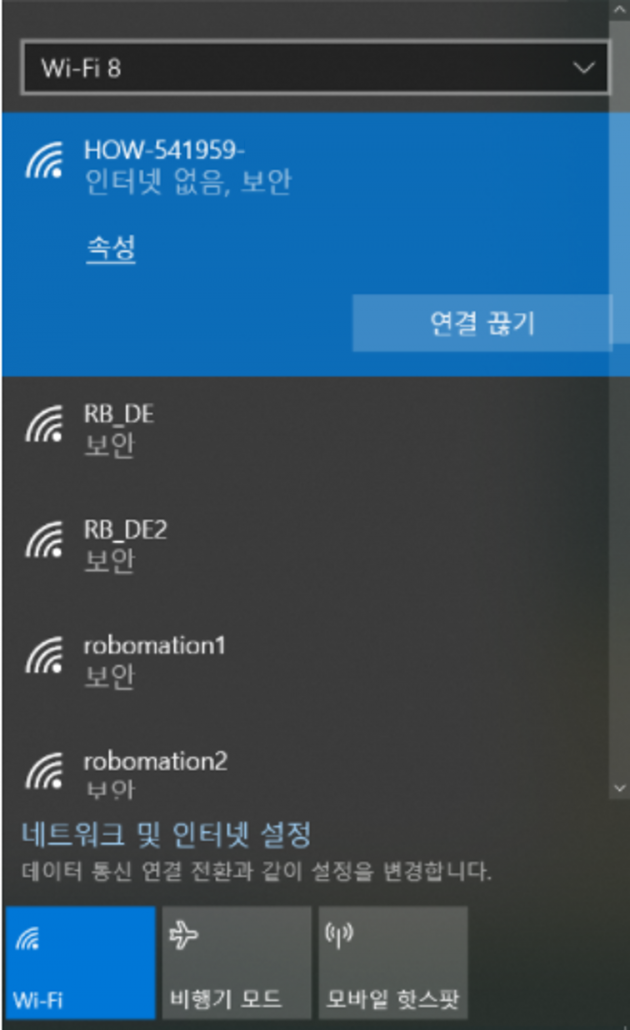
4. 햄스터 AI 카메라를 무선 네트워크 어댑터에 연결합니다.
![]()
5. 준비가 완료되면 아이콘을 클릭해 프로그램을 시작합니다.
프로그램 순서도

프로그램 실행
프로그램을 실행하면 아래와 같이 프로그램 시작 창과 안내 창이 동시에 나타납니다.

게임 실행 전 유의 사항을 꼭 읽어보시기 바랍니다.
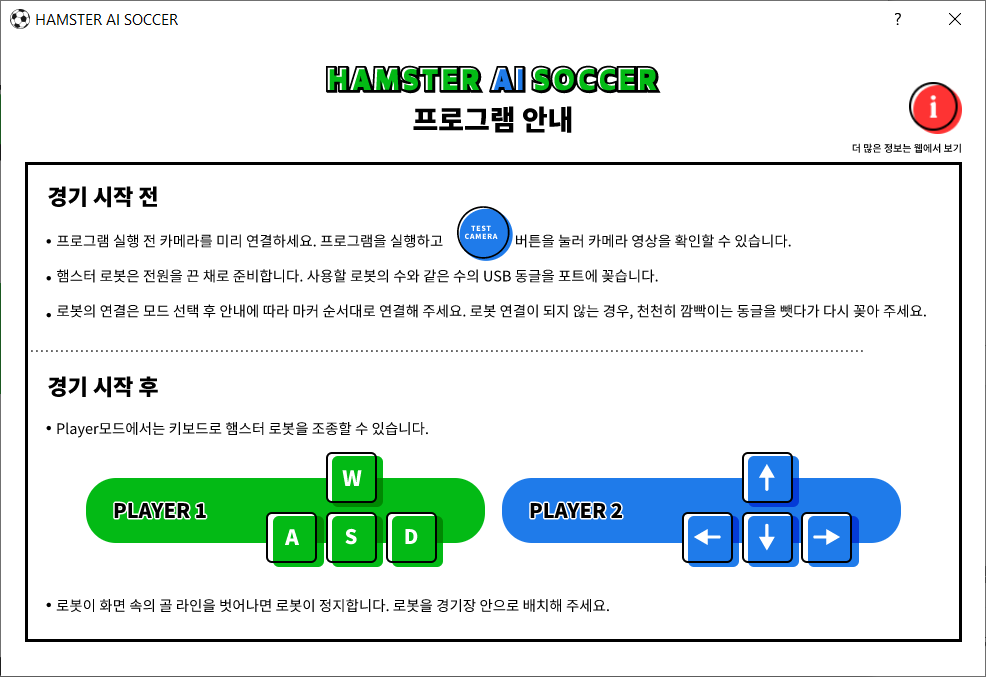
프로그램 동작 방식을 모두 이해하면 안내 창을 끄고 TEST CAMERA 버튼을 클릭합니다.
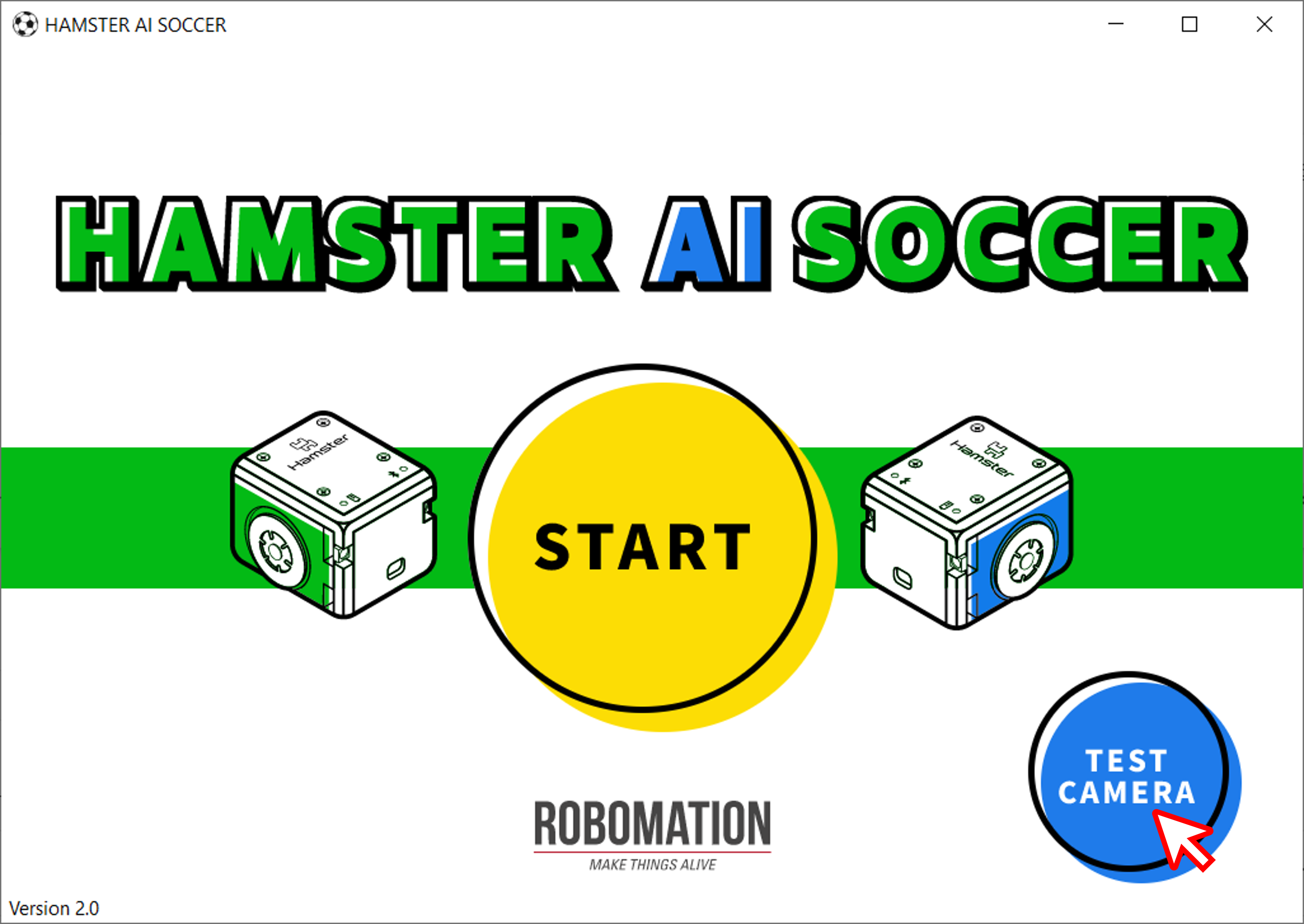
카메라 연결 여부에 따라 다른 화면이 나타납니다.
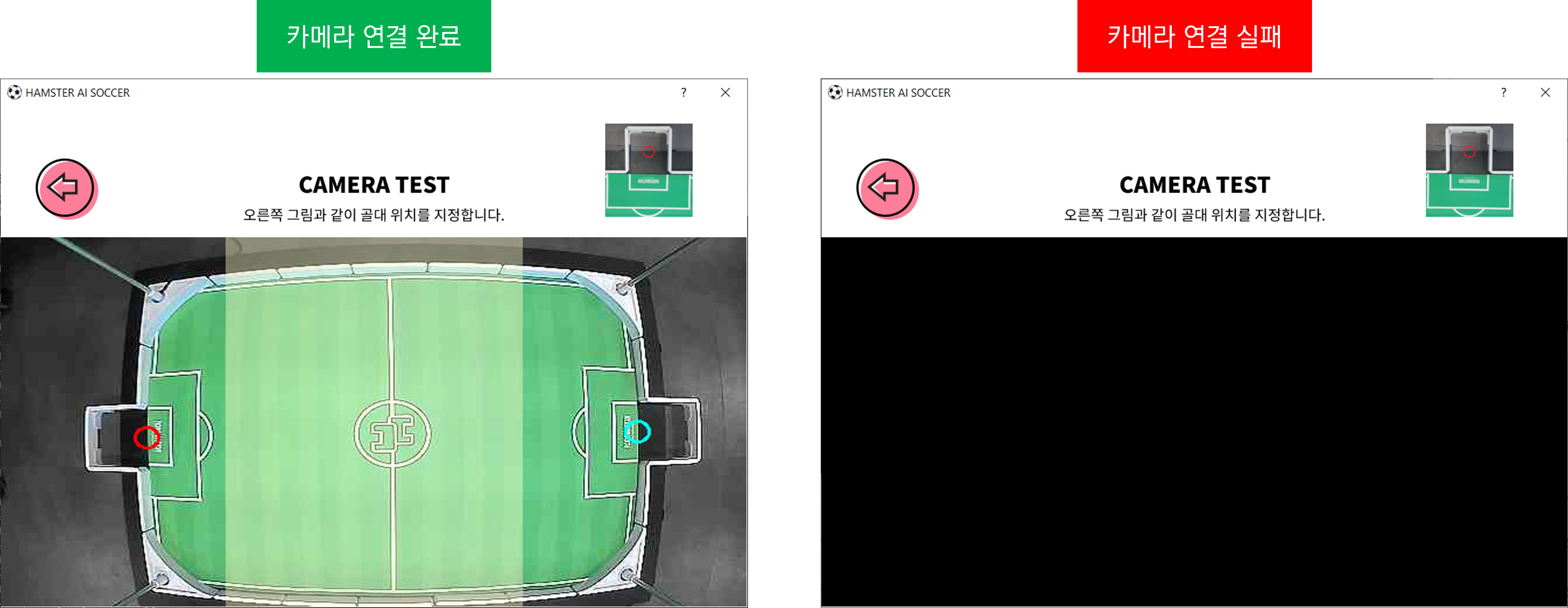
카메라가 제대로 연결 되었으면 화면 오른쪽 위의 사진을 참고하여 각 골대의 골포인트를 지정해 줍니다.
이 때 반드시 빨간색 왼쪽 골 포인트부터 위치를 지정합니다.
음영처리된 부분은 클릭이 되지 않습니다.

사진 속 위치는 권장 사항입니다.
본인이 골로 인식하기를 원하는 영역이 다르다면 다른 위치로 골대를 지정해도 됩니다.
아래의 빨강과 파랑으로 음영처리한 부분이 골 포인트 위치에 따른 골 인식 영역이므로 참고하시기 바랍니다.
로봇 볼이 해당 영역 안으로 들어가면 1점이 더해집니다.
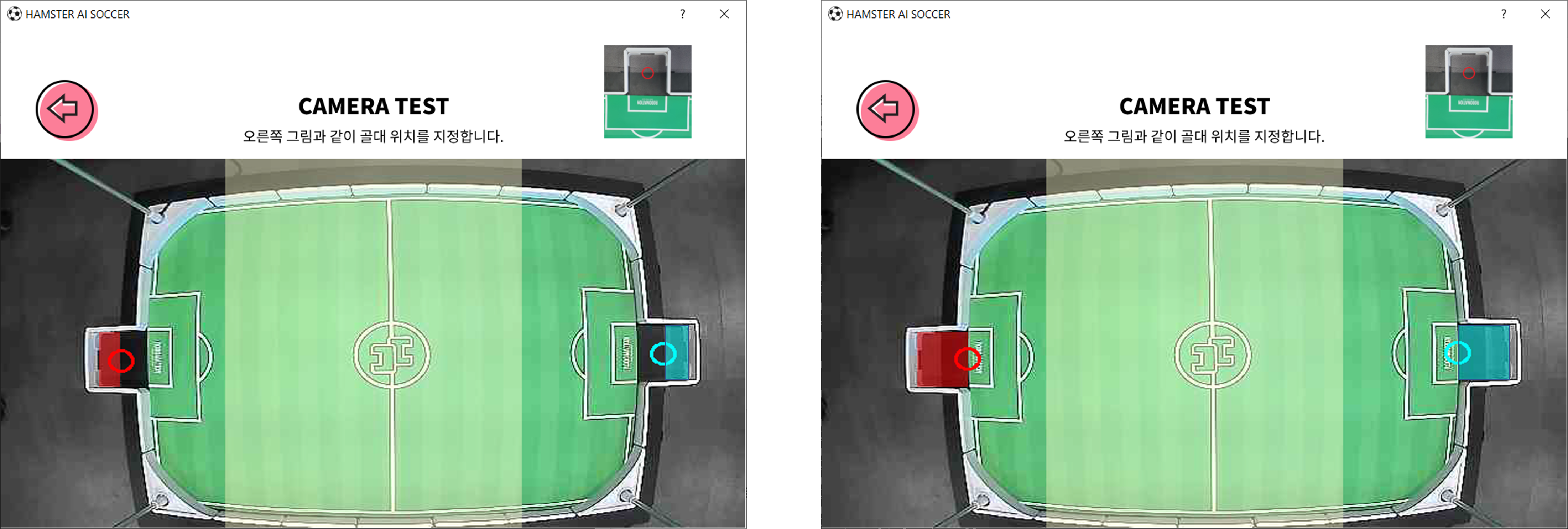
골대 위치 지정을 완료한 후 뒤로 가기 버튼을 클릭하고 시작 창에서 START 버튼을 클릭합니다.

햄스터만 사용하는 것과 슈터를 같이 활용하는 모드 중 원하는 것을 선택합니다.
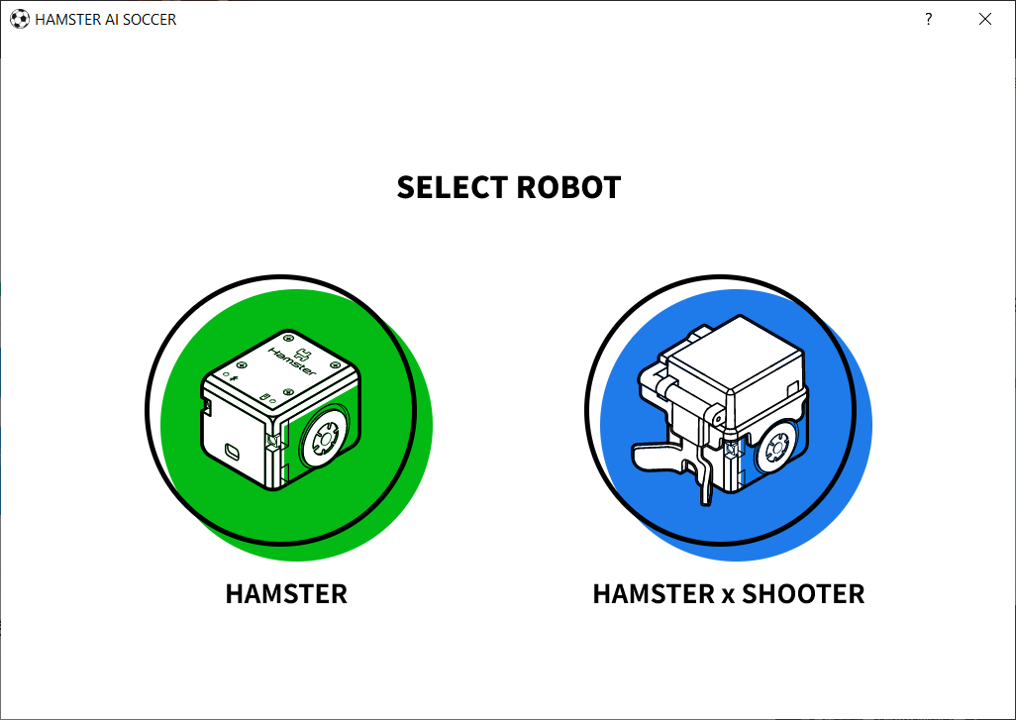
슈터는 햄스터/햄스터S의 액세서리입니다.
연결 케이블로 햄스터의 -+, AB포트에 슈터를 연결하여 사용합니다.
슈터를 장착하면 햄스터가 슛을 할 수 있게 됩니다.
사용할 PC의 수를 선택합니다.
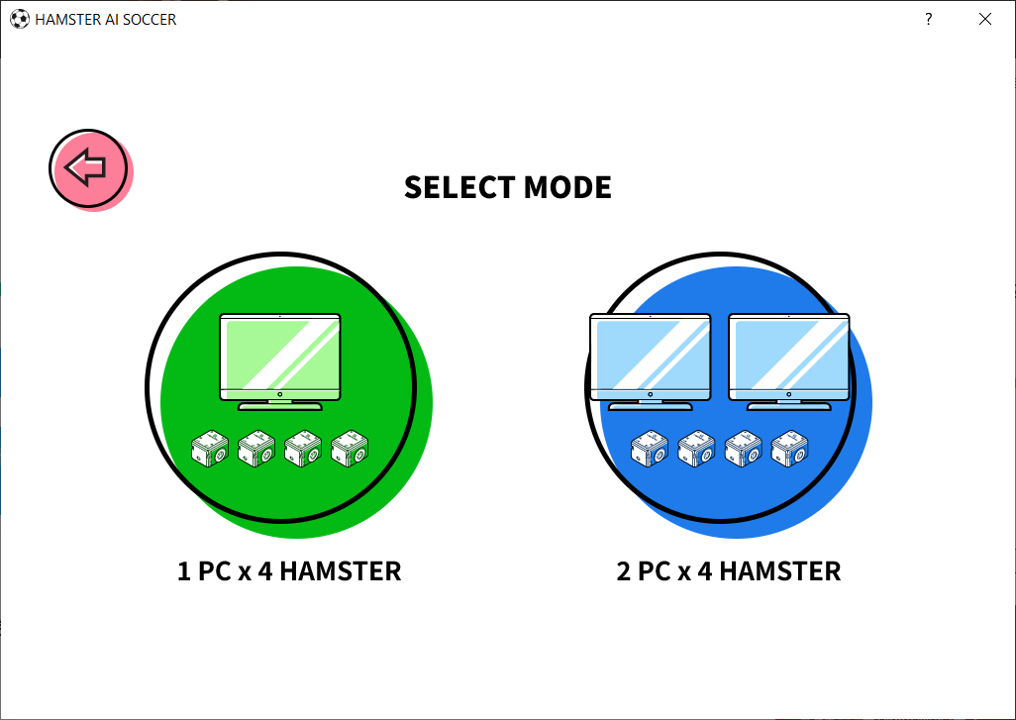
1 PC 사용 선택 시
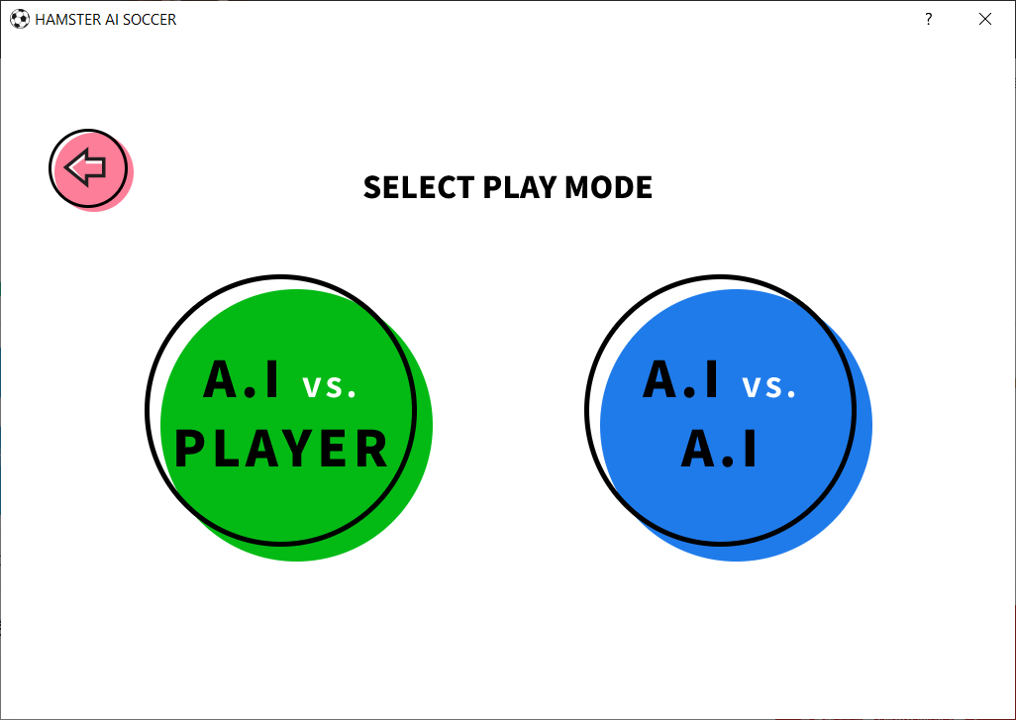
AI vs. PLAYER 모드와 AI vs. AI 모드 중 선택합니다.
AI vs. PLAYER 모드 선택 시 Hamster1, Hamster2를 키보드로 동작합니다.
- Hamster1 동작키: 화살표, 슛(엔터)
- Hamster2 동작키: w,a,s,d, 슛(스페이스 바)
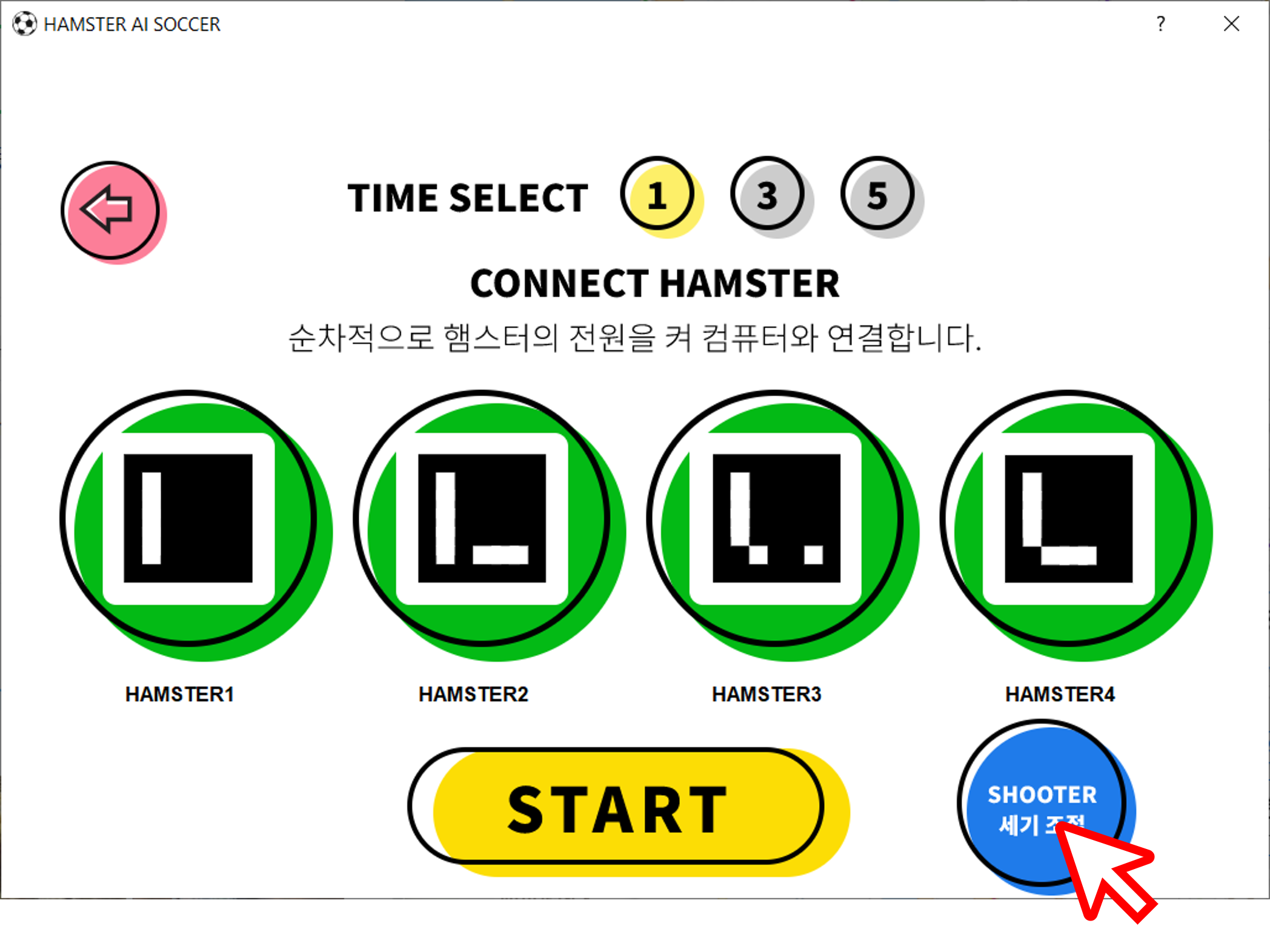
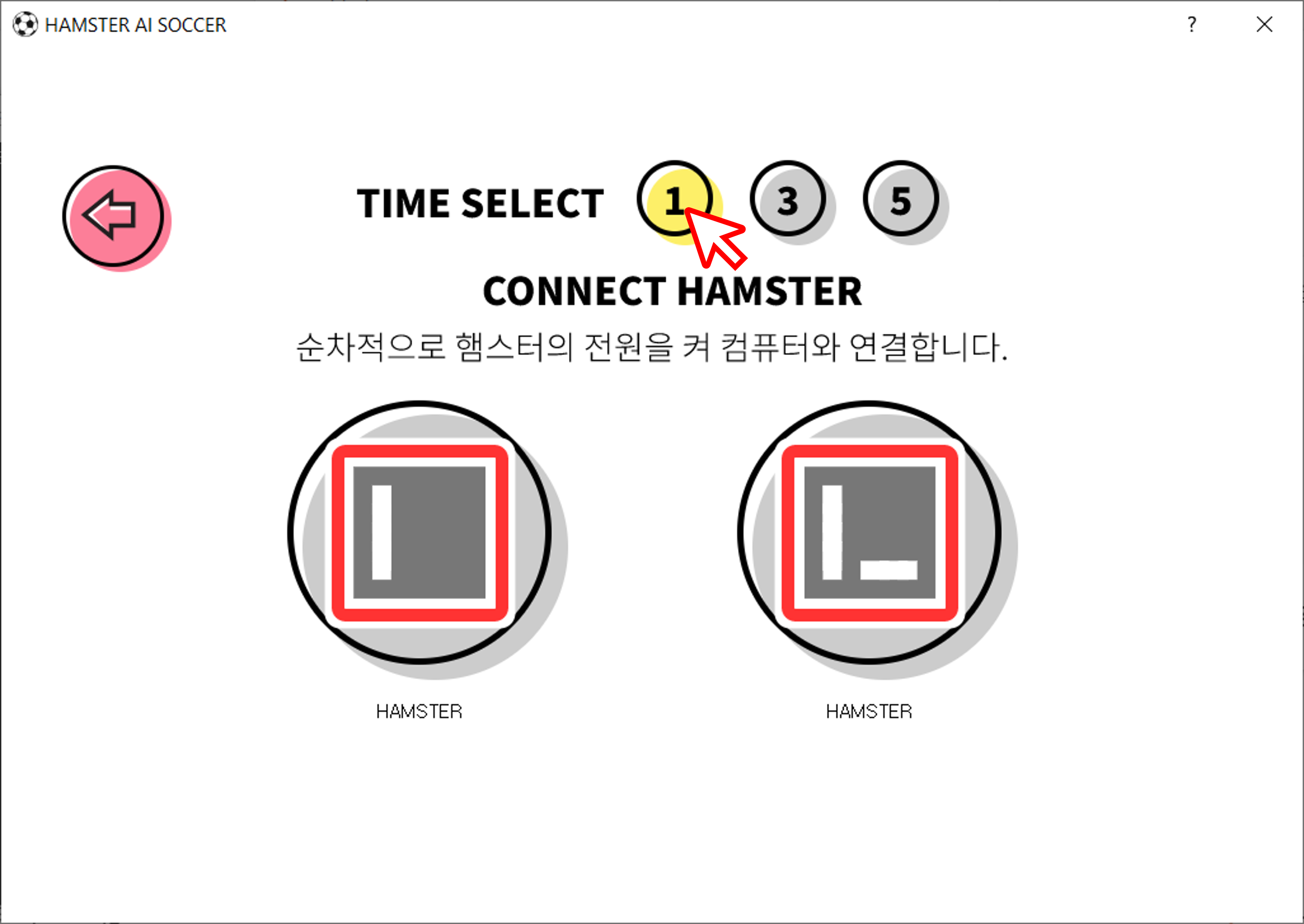
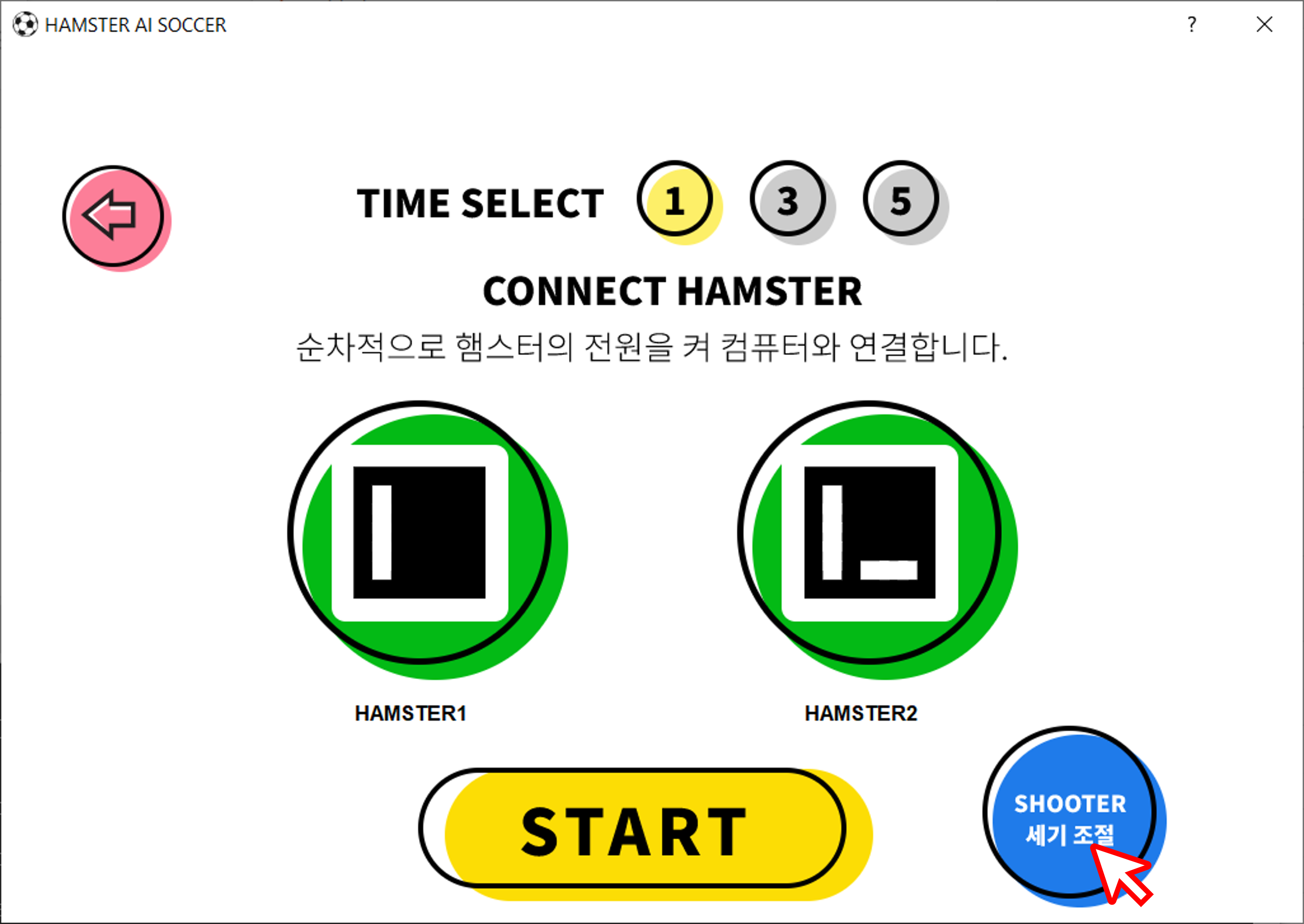
TIME SELECT 옆 숫자를 클릭하여 1분, 3분, 5분 중 플레이 시간을 정할 수 있습니다.
<<햄스터만 사용 시>>
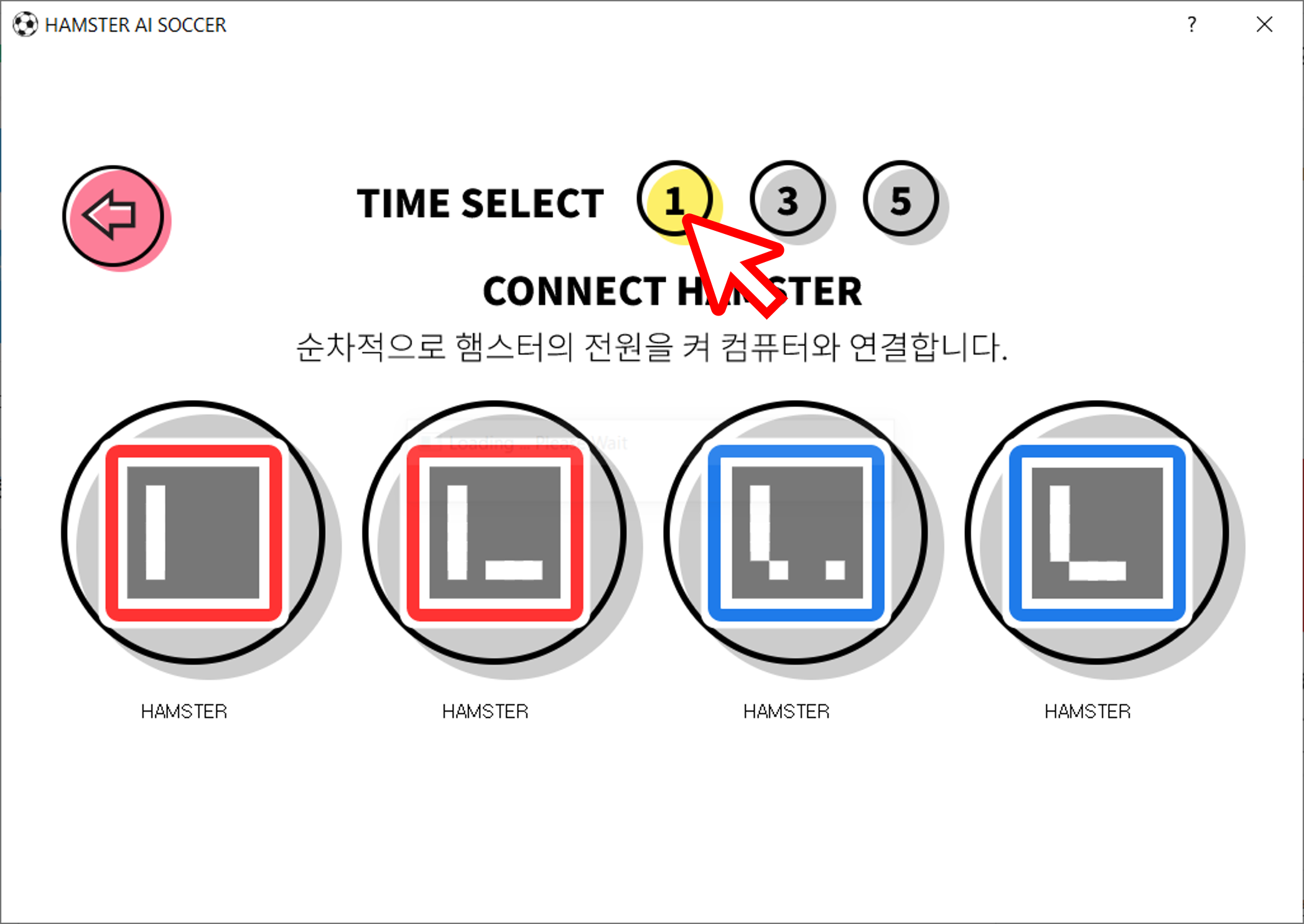
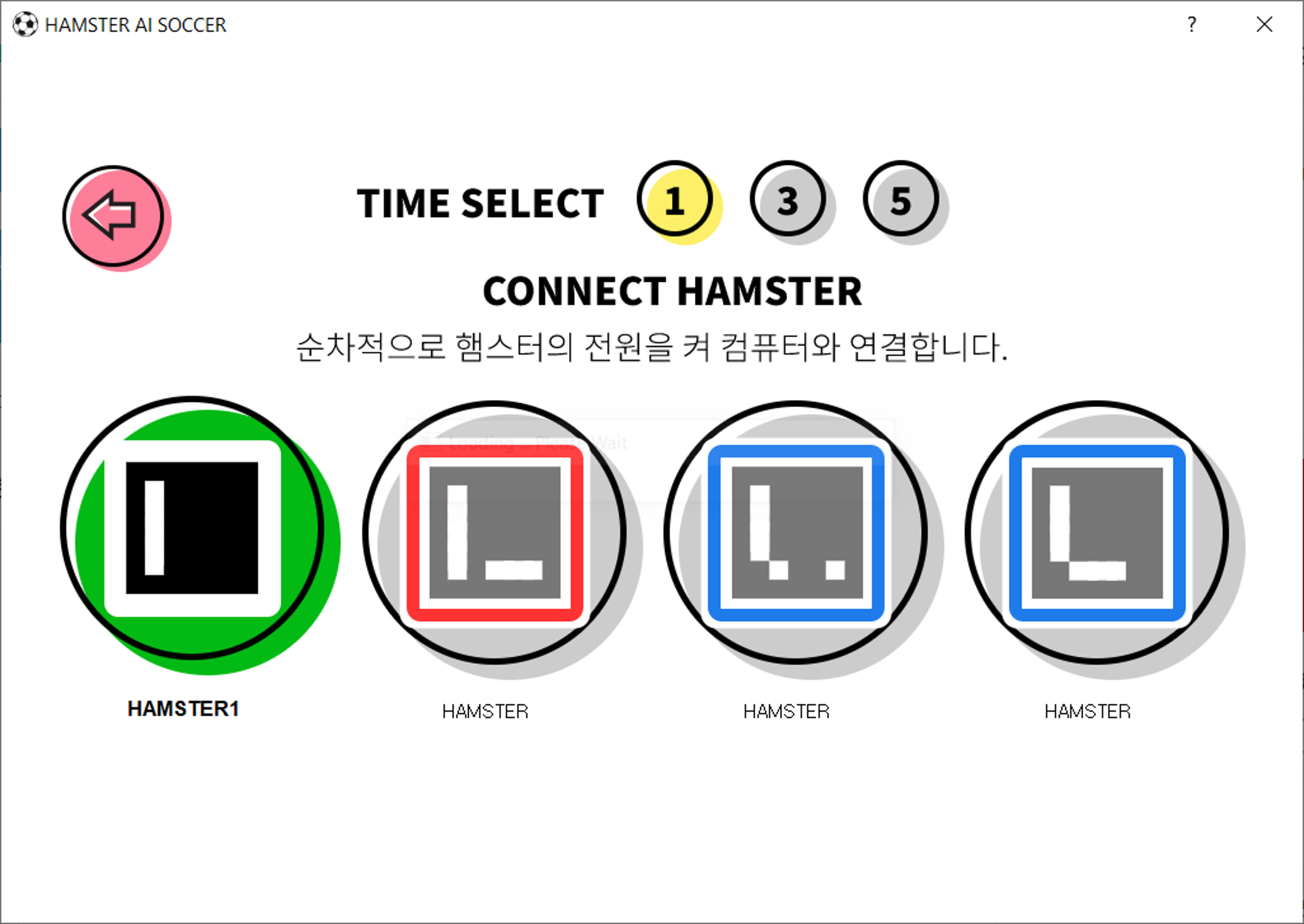
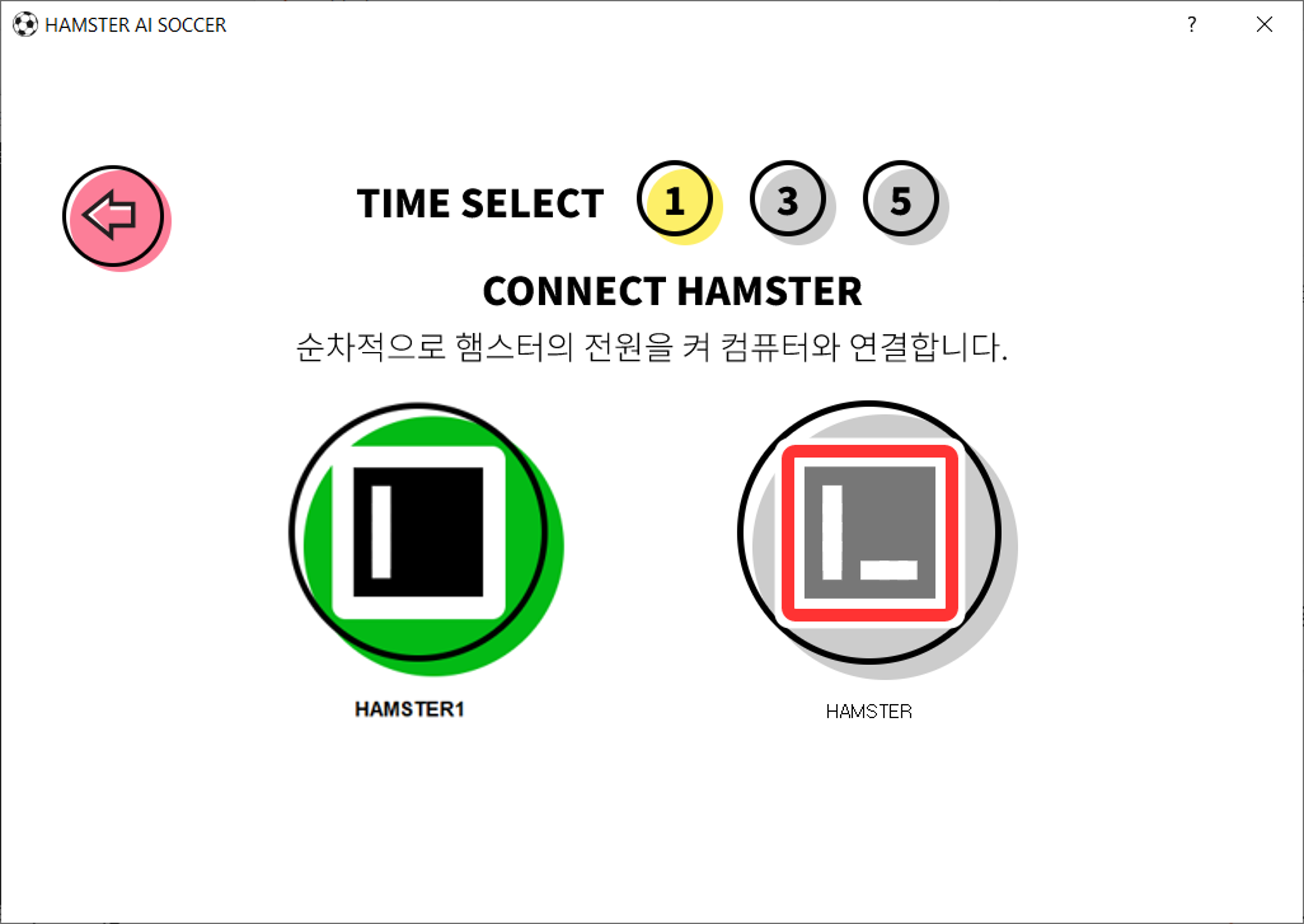
마커를 붙인 순서에 맞춰 햄스터 로봇을 1대씩 차례대로 블루투스 동글과 페어링합니다.
페어링 후 반드시 화면 상 연결된 것으로 나타나는 아루코 마커의 모양과 실제 로봇에 붙인 마커의 모양이 같은지 확인합니다.
(햄스터와 연결된 동글은 연결 표시등이 계속 켜져 있고 연결이 안된 동글은 연결 표시등이 깜빡입니다.)
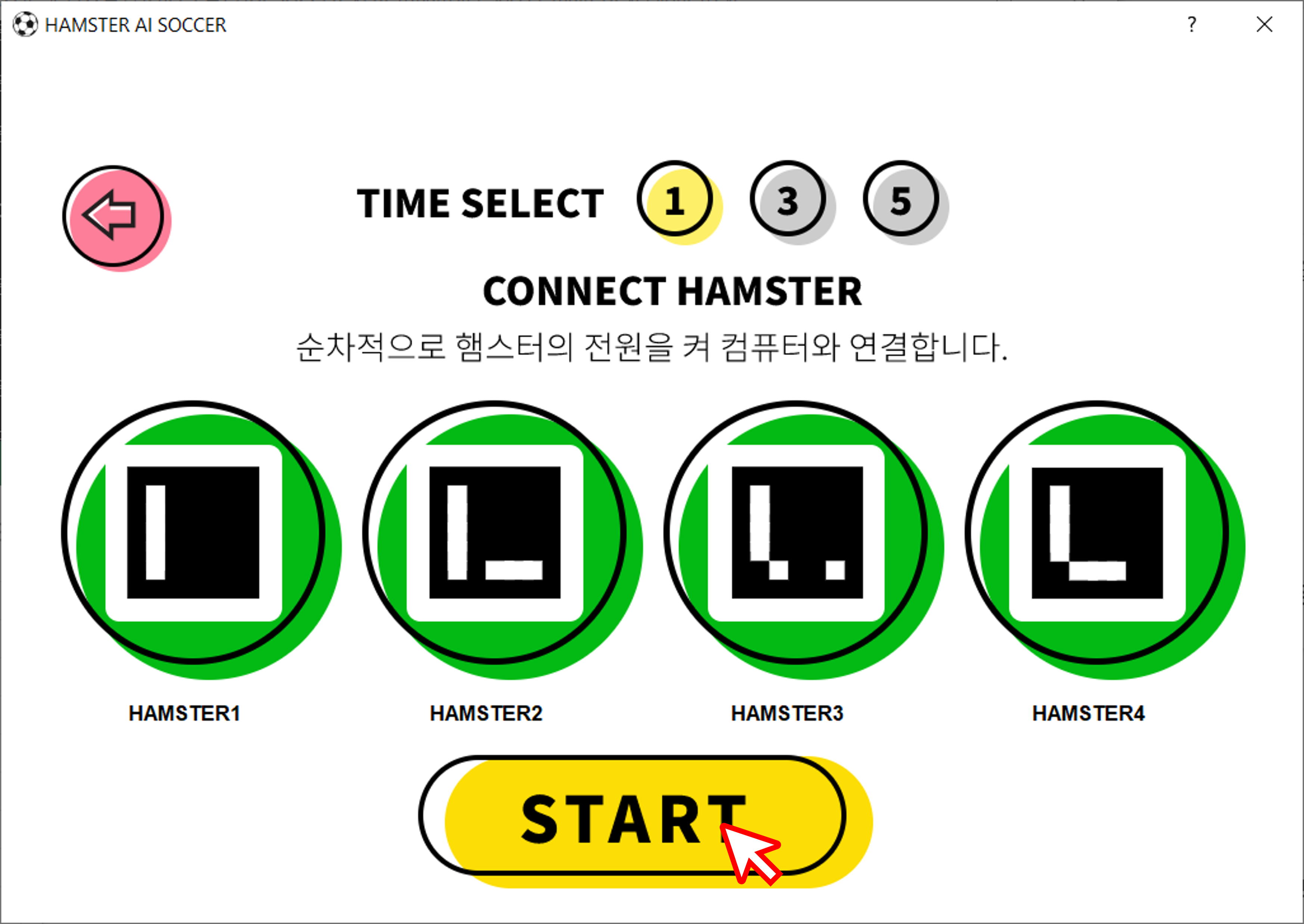
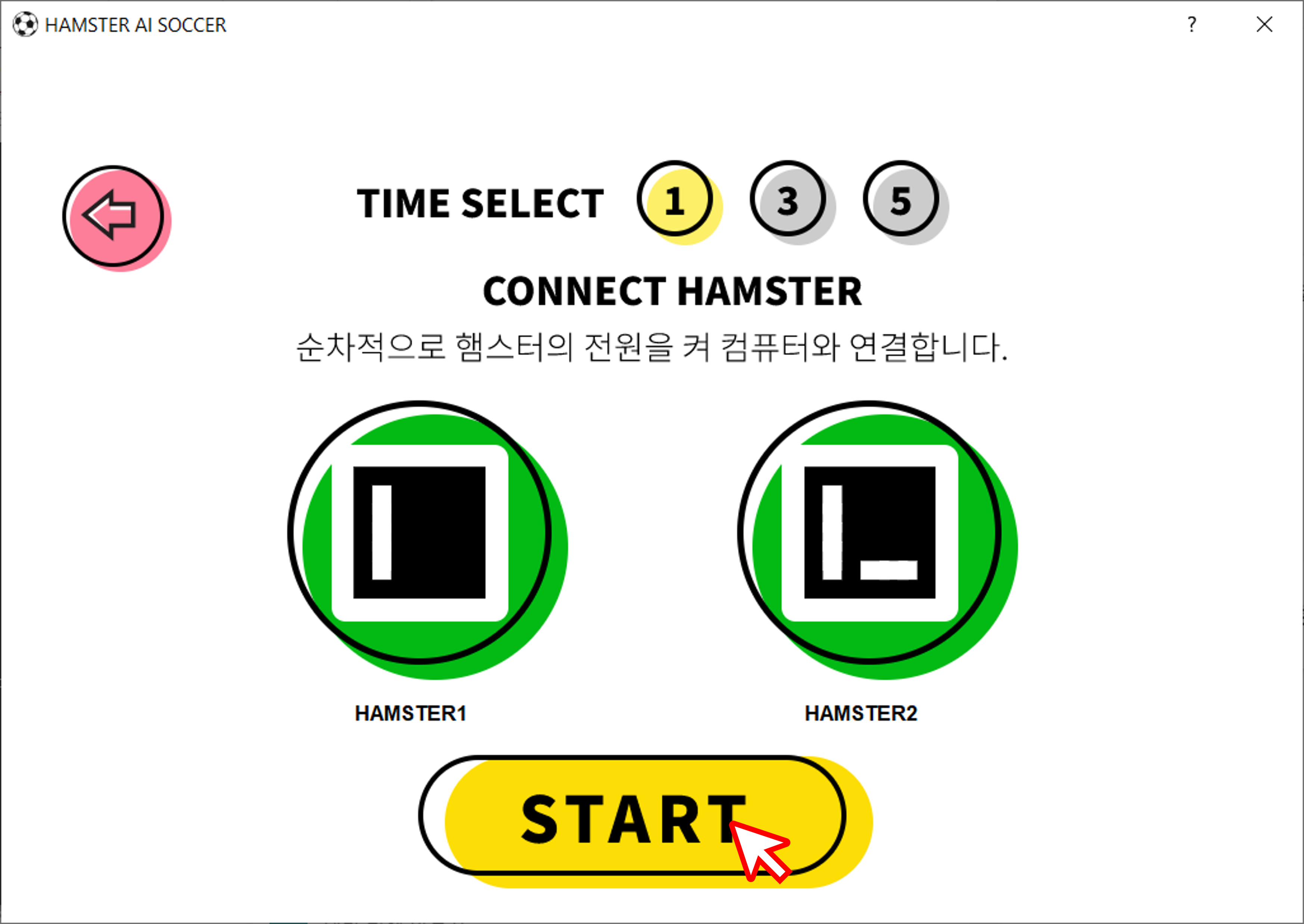
첫 번째 연결이 완료되면 화면이 아래와 같이 바뀝니다.
4대 모두 연결이 완료되면 나타나는 START 버튼을 클릭해 게임을 시작합니다.
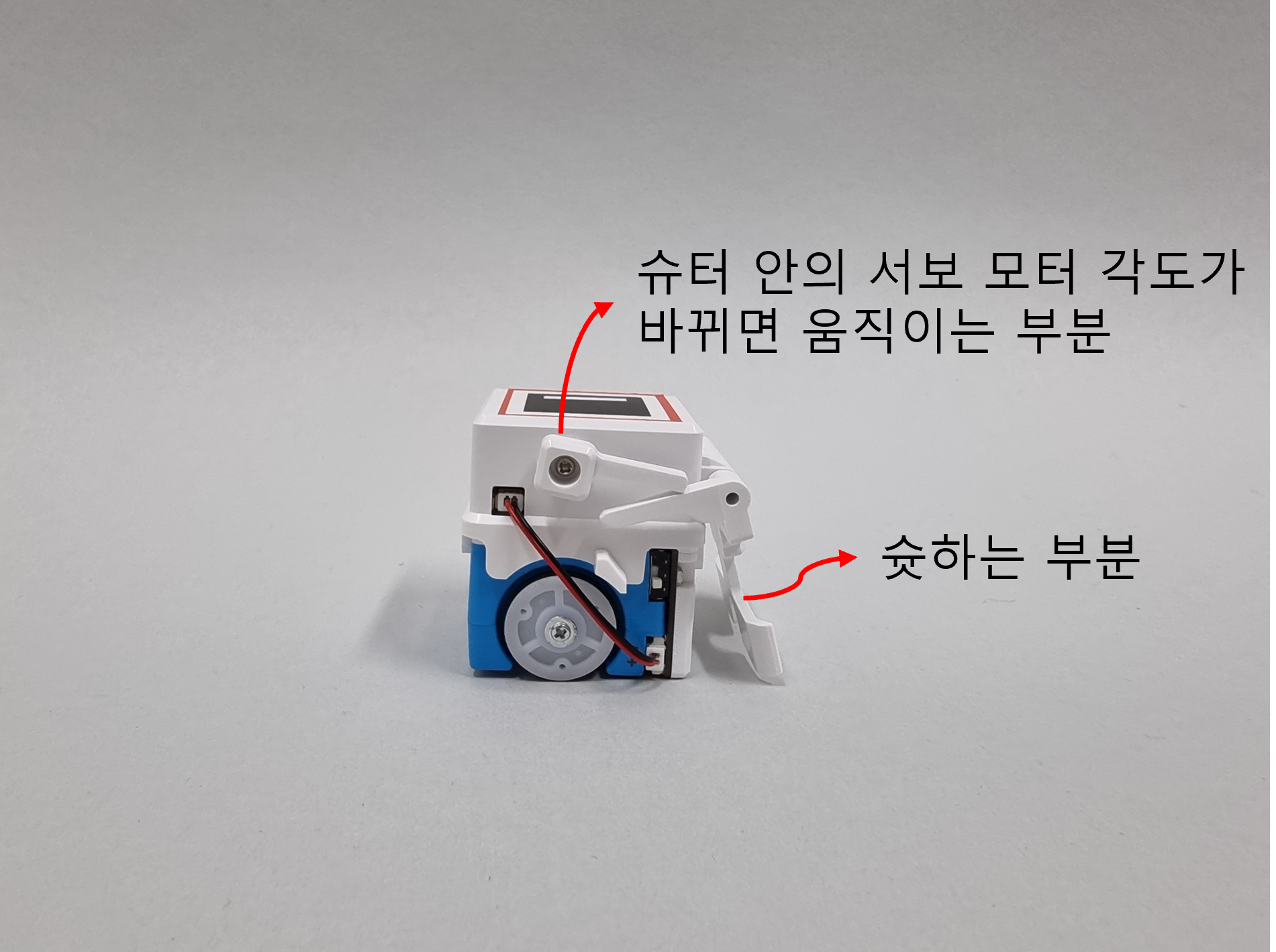
<<슈터 활용 시>>
슈터는 내부 서보 모터의 각도 변화로 움직임을 조절합니다.
초기 자세에서 모터의 각도는 90도입니다.
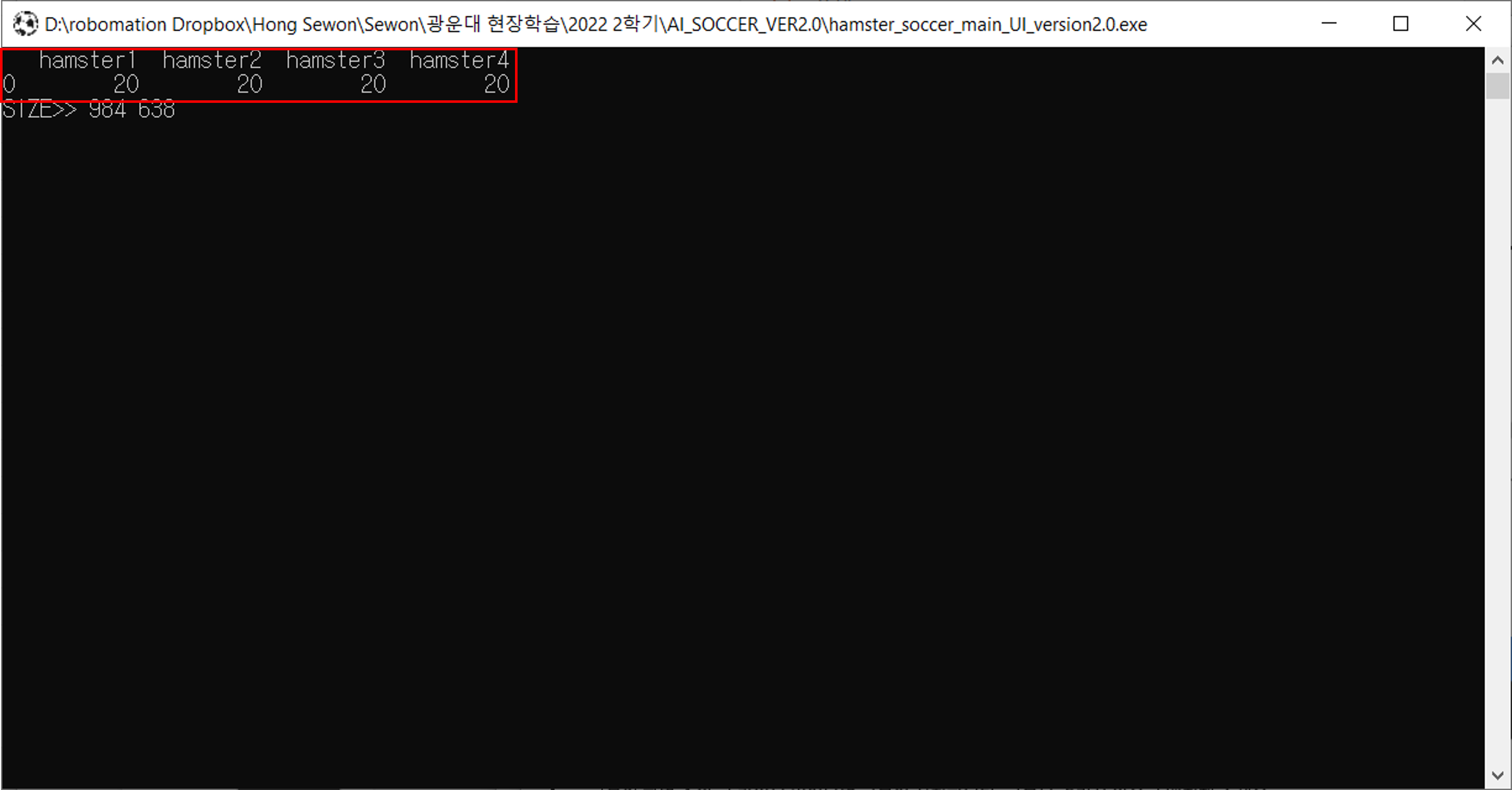
프로그램 실행 시 기본으로 정해 놓은 슛각도는 20도입니다.
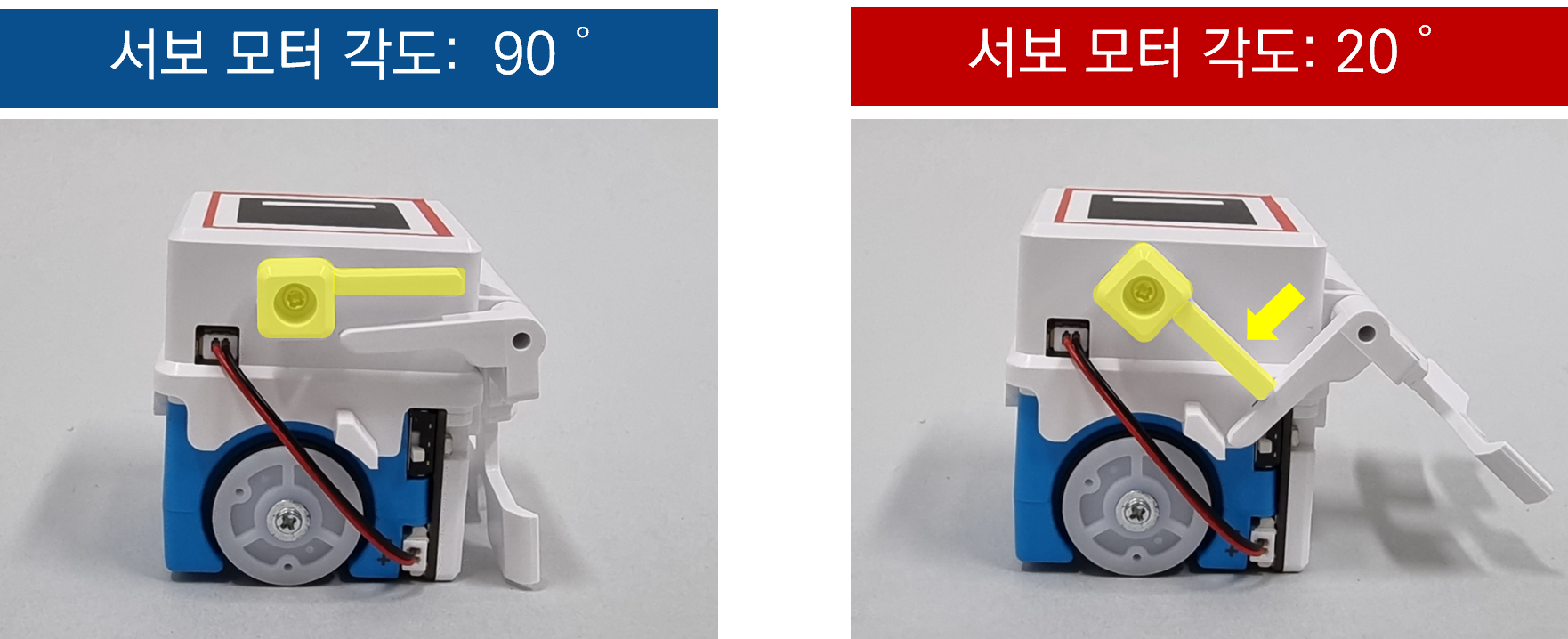
슛 기본 각도는 프로그램을 실행하면 나타나는 창을 통해서도 확인할 수 있습니다.
SHOOTER 세기 조절 버튼으로 게임 시작 전 슈팅 세기를 조절할 수 있습니다.
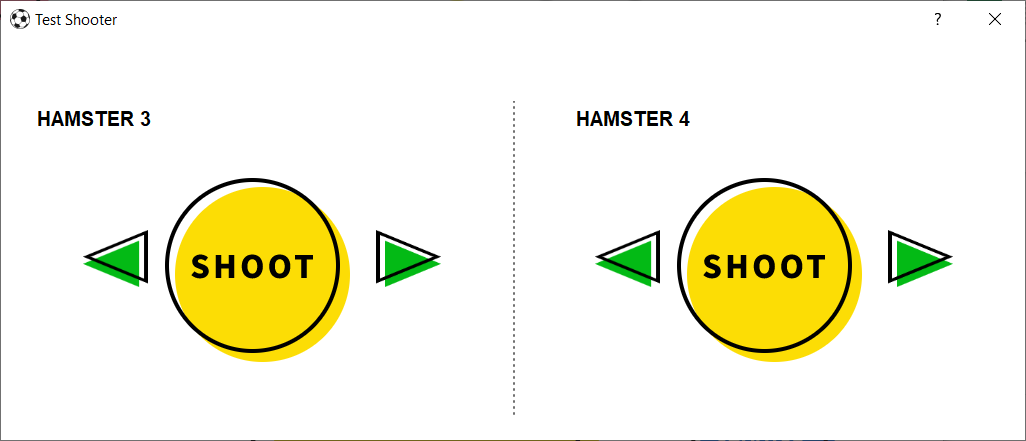
버튼을 클릭하면 아래와 같은 창이 나타나고 이 창에서 각 슈터의 슛 각도를 조절해 슛 세기를 바꿀 수 있습니다.
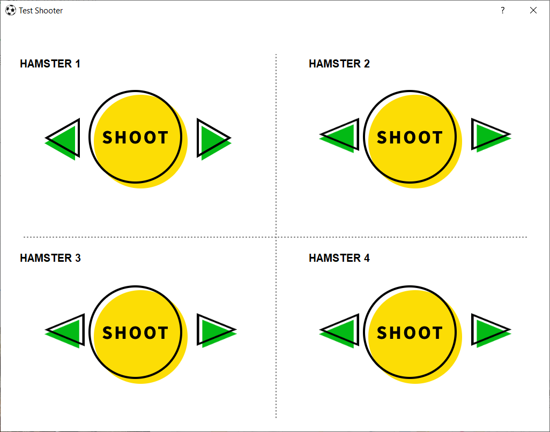
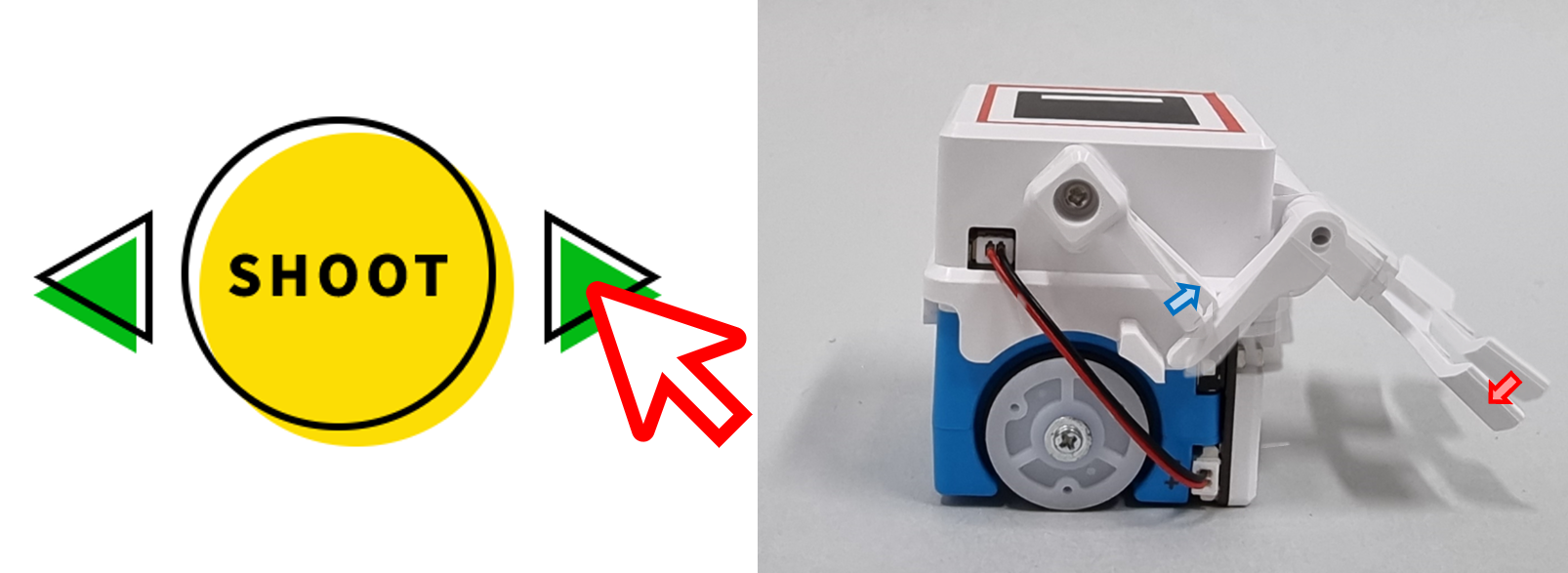
양쪽의 각도 조절 버튼을 클릭하면 슈터가 슛 자세를 취한 후 그 자세 그대로 정지합니다.
왼쪽 화살표 버튼을 클릭하면 슛할 때의 각도가 기본인 20도에서 5도씩 줄어듭니다.
한 번 클릭 시 슛 각도가 15도로 변하고 슛하는 부분이 더 위쪽까지 들리게 됩니다.
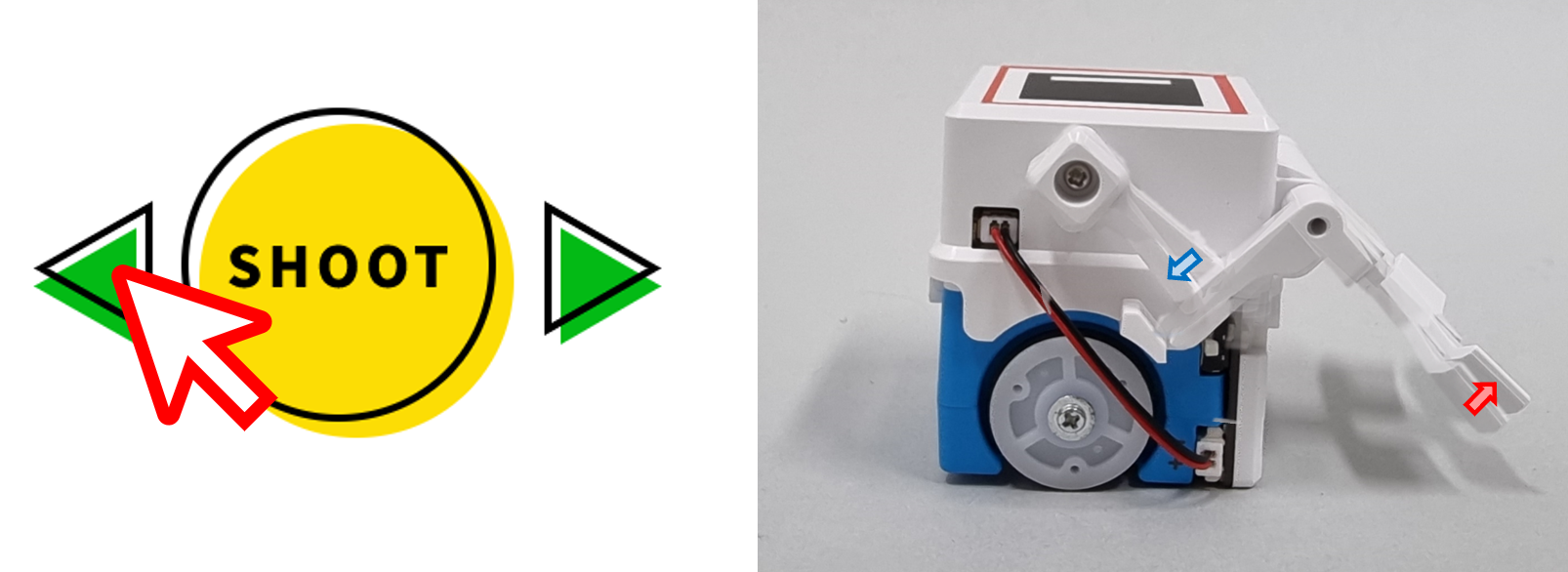
오른쪽 화살표 버튼을 클릭하면 반대로 슛 기본 각도가 5도만큼 늘어납니다.
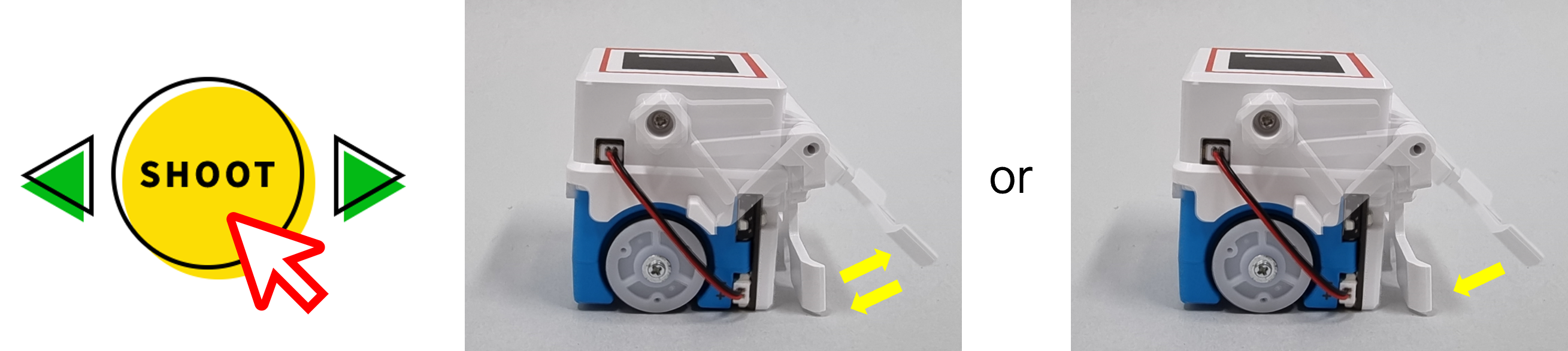
SHOOT 버튼을 클릭하면 슈터가 슈팅 각도로 움직여 슛을 한 후 다시 90도로 바뀌어 원위치로 돌아옵니다.
이미 슛하는 자세를 취하고 있었을 경우 원위치로 돌아오는 동작만 취합니다.
2 PC 사용 선택 시
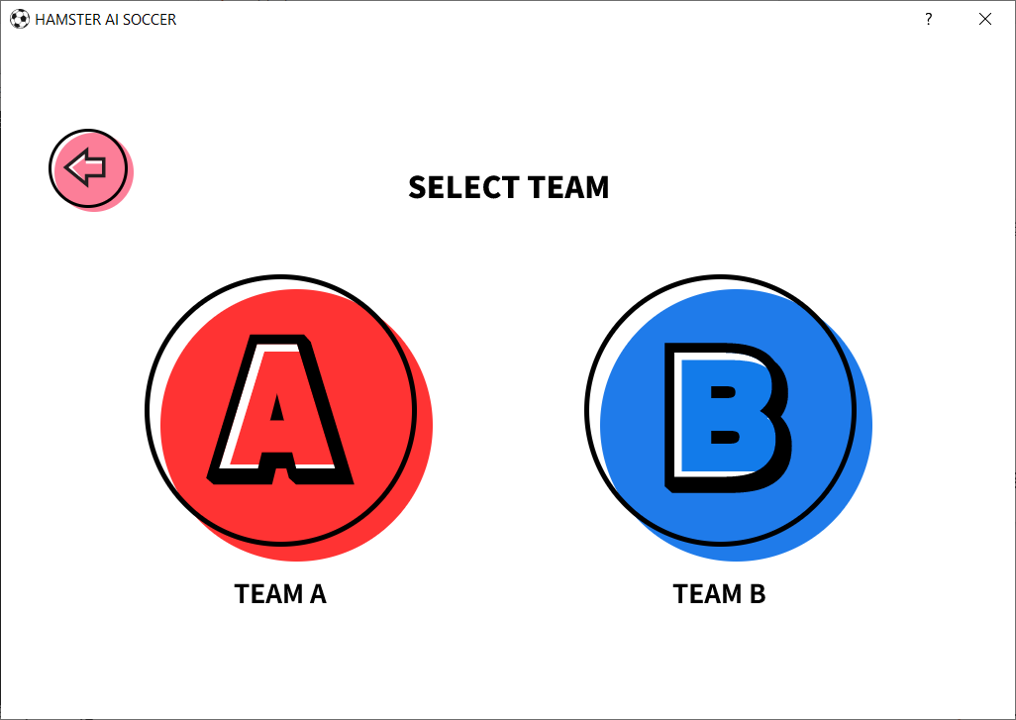
팀 A와 B 중 하나를 선택합니다.
A팀 선택 시 Hamster1, Hamster2를 키보드로 동작합니다.
- Hamster1 동작키: 화살표, 슛(엔터)
- Hamster2 동작키: w,a,s,d, 슛(스페이스 바)
B팀 선택 시 Hamster3, Hamster4를 키보드로 동작합니다.
- Hamster1 동작키: 화살표, 슛(엔터)
- Hamster2 동작키: w,a,s,d, 슛(스페이스 바)
PC와 연결하지 않은 2대의 햄스터는 스마트폰이나 태블릿으로도 조종 가능합니다.
다른 기기 사용 시에는 1대만 pc에 연결합니다.
예를 들어 스마트폰으로 A팀 로봇들을 연결했으면 PC로는 B팀 로봇들을 연결합니다.
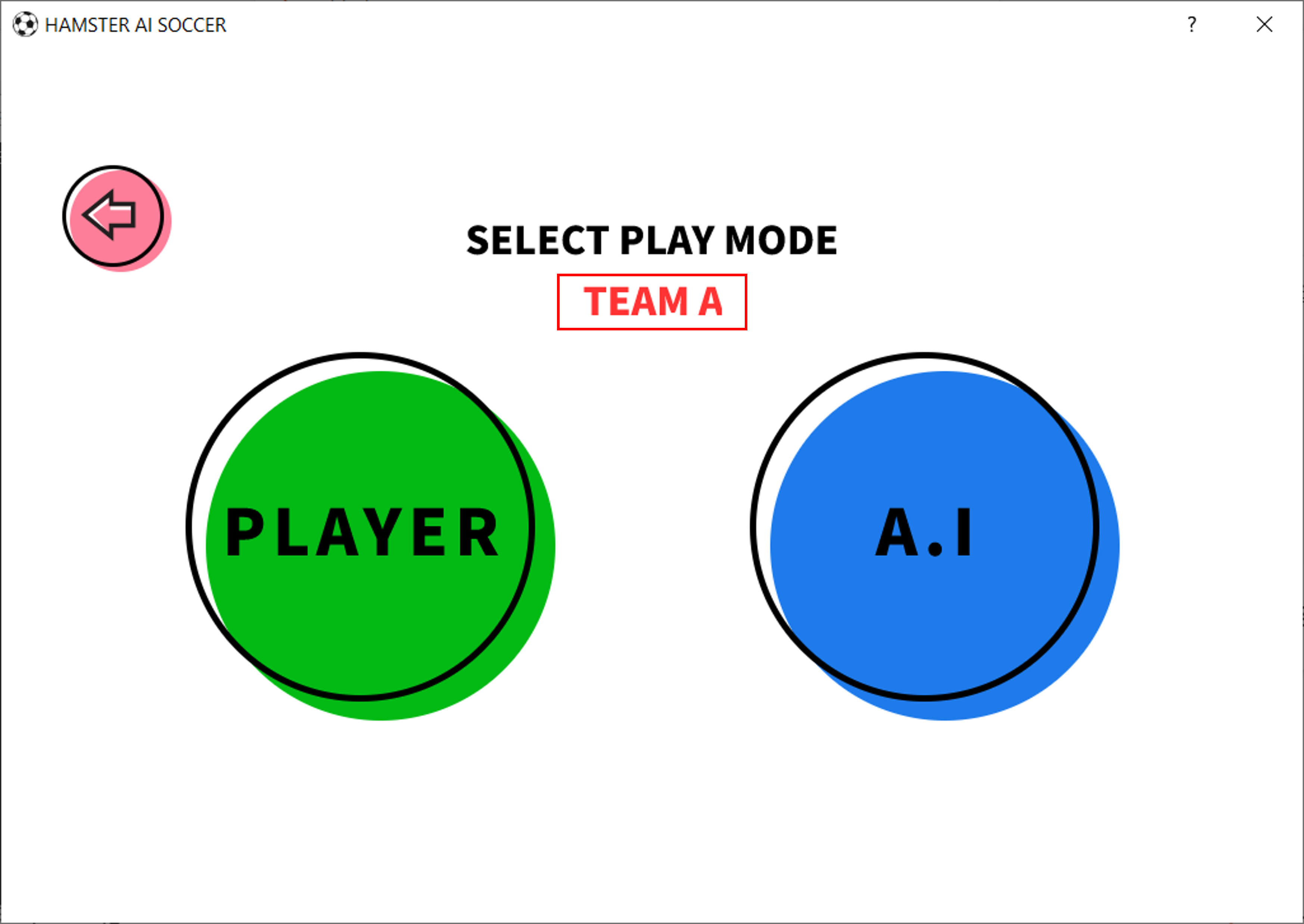
직접 햄스터를 조종하는 PLAYER 모드와 인공지능이 햄스터를 조종하는 A.I 모드 중 하나를 선택합니다.
SELECT PLAY MODE 아래 내가 고른 팀이 어느 쪽인지 나타납니다.
TIME SELECT 옆 숫자를 클릭하여 1분, 3분, 5분 중 플레이 시간을 정할 수 있습니다.
햄스터 로봇을 마커를 붙인 순서에 맞춰 1대씩 차례대로 블루투스 동글과 페어링합니다.
페어링 후 반드시 화면 상 연결된 것으로 나타나는 아루코 마커의 모양과 실제 로봇에 붙인 마커의 모양이 같은지 확인합니다.
(햄스터와 연결된 동글은 연결 표시등이 계속 켜져 있고 연결이 안된 동글은 연결 표시등이 깜빡입니다.)
첫 번째 연결이 완료되면 화면이 아래와 같이 바뀝니다.
2대 모두 연결이 완료되면 나타나는 START 버튼을 클릭해 게임을 시작합니다.
<<햄스터만 사용 시>>
<<슈터 활용 시>>
슈터는 내부 서보 모터의 각도 변화로 움직임을 조절합니다.
초기 자세에서 모터의 각도는 90도입니다.
프로그램 실행 시 기본으로 정해 놓은 슛각도는 20도입니다.
슛 기본 각도는 프로그램을 실행하면 나타나는 창을 통해서도 확인할 수 있습니다.
SHOOTER 세기 조절 버튼으로 게임 시작 전 슈팅 세기를 조절할 수 있습니다.
버튼을 클릭하면 아래와 같은 창이 나타나고 이 창에서 각 슈터의 슛 각도를 조절해 슛 세기를 바꿀 수 있습니다.
양쪽의 각도 조절 버튼을 클릭하면 슈터가 슛 자세를 취한 후 그 자세 그대로 정지합니다.
왼쪽 화살표 버튼을 클릭하면 슛할 때의 각도가 기본인 20도에서 5도씩 줄어듭니다.
한 번 클릭 시 슛 각도가 15도로 변하고 슛하는 부분이 더 위쪽까지 들리게 됩니다.
오른쪽 화살표 버튼을 클릭하면 슛 기본 각도가 5도만큼 늘어납니다.
SHOOT 버튼을 클릭하면 슈터가 슈팅 각도로 움직여 슛을 한 후 다시 90도로 바뀌어 원위치로 돌아옵니다.
이미 슛하는 자세를 취하고 있었을 경우 원위치로 돌아오는 동작만 취합니다.
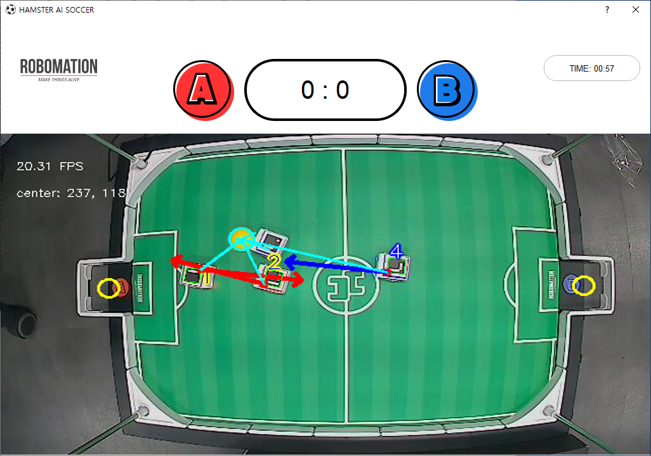
플레이 화면
게임이 시작되면 각 팀에서 공과 가까운 로봇이 공을 추적합니다.
충돌을 방지하기 위해 공과 먼 로봇은 공과 가까운 로봇을 추적하며 일정 거리를 유지합니다.
로봇이 골 라인 밖으로 나가면 모든 로봇들이 정지합니다.
이 때는 로봇을 경기장 안에 재배치해야 게임이 이어집니다.
<<햄스터만 사용 시>>
<<슈터 활용 시>>
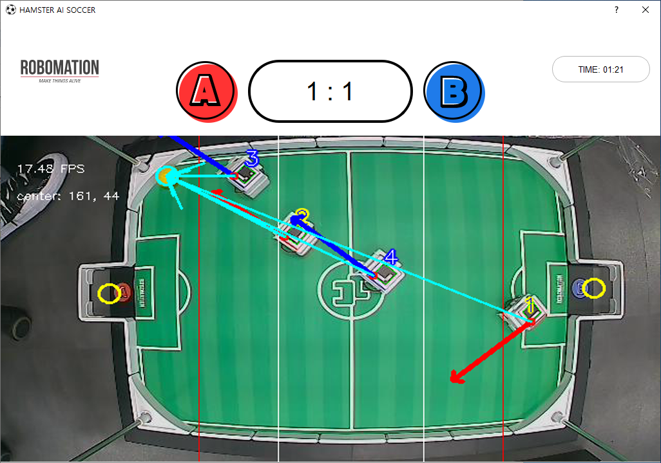
슈터 활용 모드에서는 화면에 흰 선과 빨간 선이 나타나며 두 선 사이 영역에서만 햄스터가 슈팅을 시도합니다.
A팀 근처의 수직 빨간 선 근처에서 A팀은 상대방의 로봇 볼을 걷어내기 위해 B팀을 향해 슛을 합니다.
흰 선과 빨간 선 사이 영역에서는 B팀이 A팀 골대를 향해 슛을 합니다.
<<골을 넣었을 때>>
골을 넣으면 아래와 같은 팝업이 뜹니다.
이 때는 로봇과 공의 위치를 로봇 -> 공 순서로 재배치합니다.
로봇을 재배치하고 골대에서 로봇 볼을 꺼내 경기장 가운데 내려놓으면 경기가 재개됩니다.

<<경기 종료 화면>>
경기 시간이 모두 지나면 아래와 같은 팝업창이 떠 결과를 확인할 수 있습니다.
이후 RESTART 버튼으로 경기를 새로 시작하거나 EXIT 버튼으로 프로그램을 종료합니다.
Hamster AI Soccer로 영상인식 자율행동 로봇 축구를 즐기러 Go! Go!

