치즈 스틱과 서보 모터를 활용해 저금통을 만들어 보아요.
서보 모터를 이용해 동전을 놓고 버튼을 누르면 동전이
자동으로 저금통에 들어가도록 만들어요.
※ 본 프로젝트는 칼, 가위, 글루건 등의 도구가 필요한 프로젝트로 도구 사용시
다치지 않도록 안전에 주의하여 주시고, 보호자의 지도 하에 이용하시기 바랍니다.


부품을 준비해 주세요.

| 필요 재료 | 수량 |
|---|---|
| 치즈 스틱 본체 | 1개 |
| 스위치 | 1개 |
| 서보 모터 | 1개 |
| USB 동글 | 1개 |
| 컴퓨터 | 1대(로봇 코딩 소프트웨어 설치 필요) |
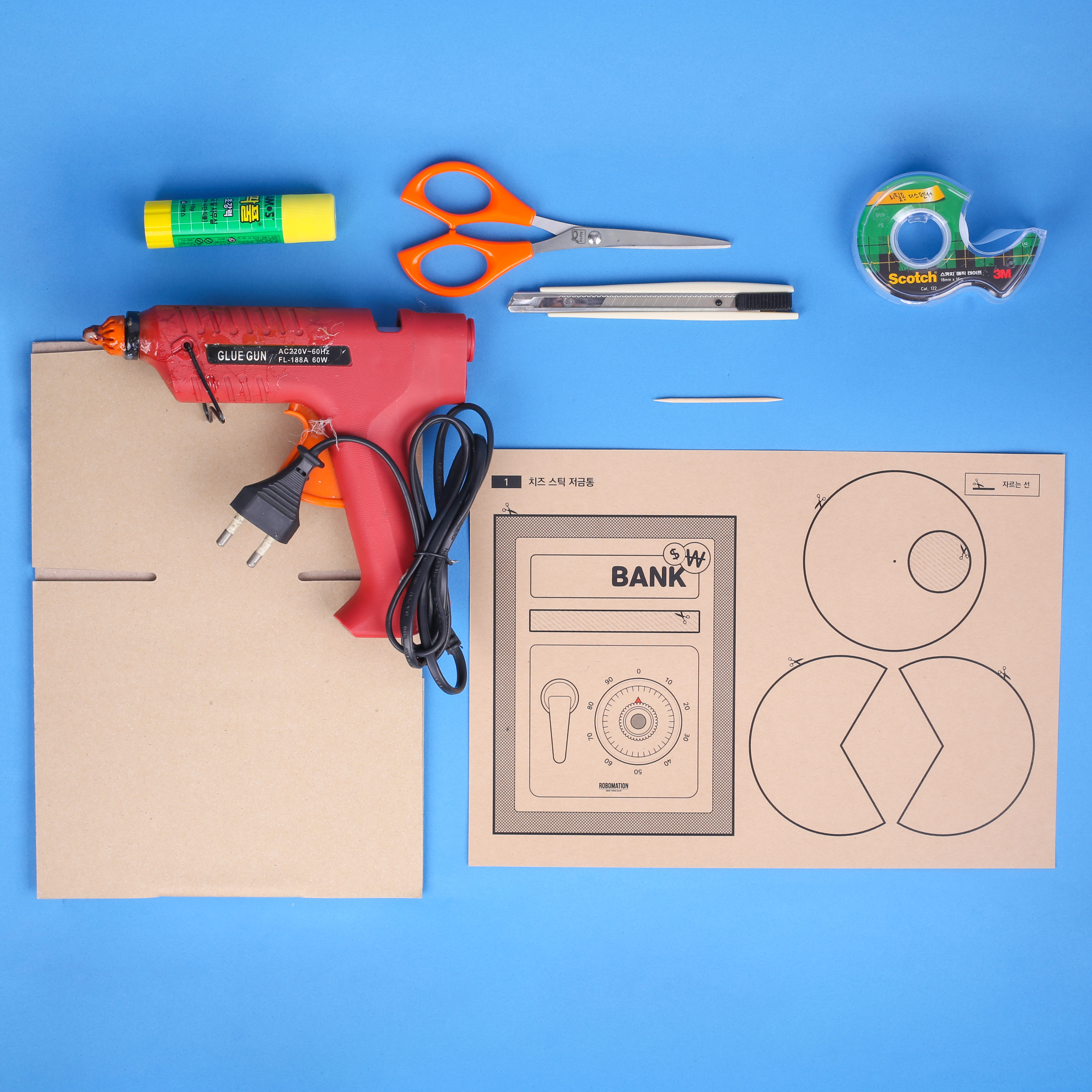
| 저금통 도안 | 가위 | 풀 |
| 양면 테이프 | 글루건 | 칼 |
| 이쑤시개 | 직사각형 상자 | 골판지 |
예제에서 사용된 박스 사러 가기 : 160x120x70mm 박스 (클릭)
예제에서 사용된 골판지 사러 가기 : 390 X 290 X 3mm : 포장용 골판지 패드 (클릭)
하드웨어를 준비해요.
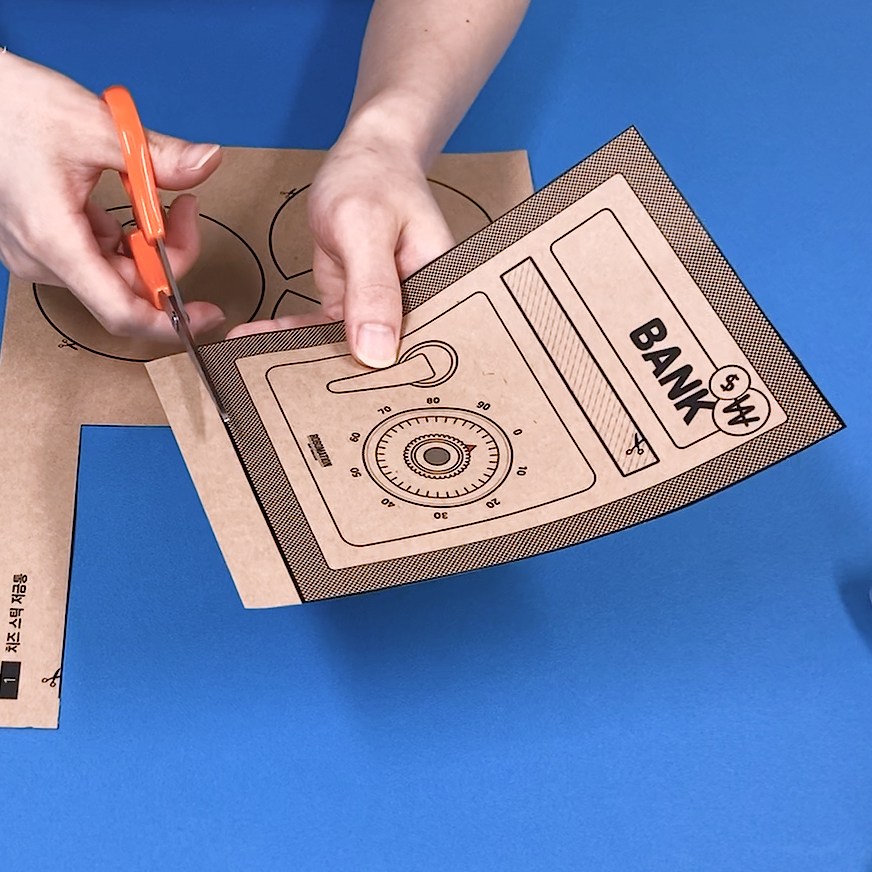
1. 저금통 도안을 인쇄해 모양대로 오려줍니다. 도안은 우측 상단의 활동 도안 다운로드 버튼을 클릭해 다운로드 받으세요.
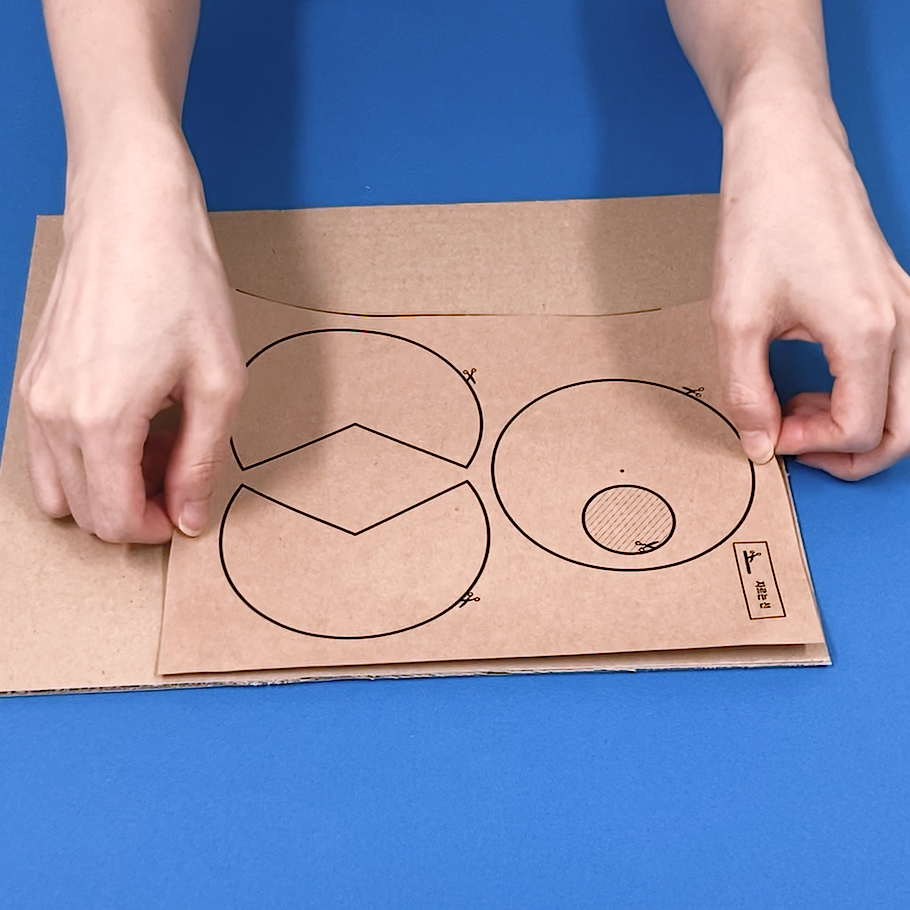
2. 동전을 올려 놓을 회전판 부분을 골판지에 붙여줍니다.

3. 도안을 따라 골판지를 오려줍니다. 두께가 있어 잘 오려지지 않으니 조심해서 천천히 잘라주세요.
동전을 올려 놓을 부분은 칼을 이용해 오려줍니다. 이 때 특히 주의하시기 바랍니다.
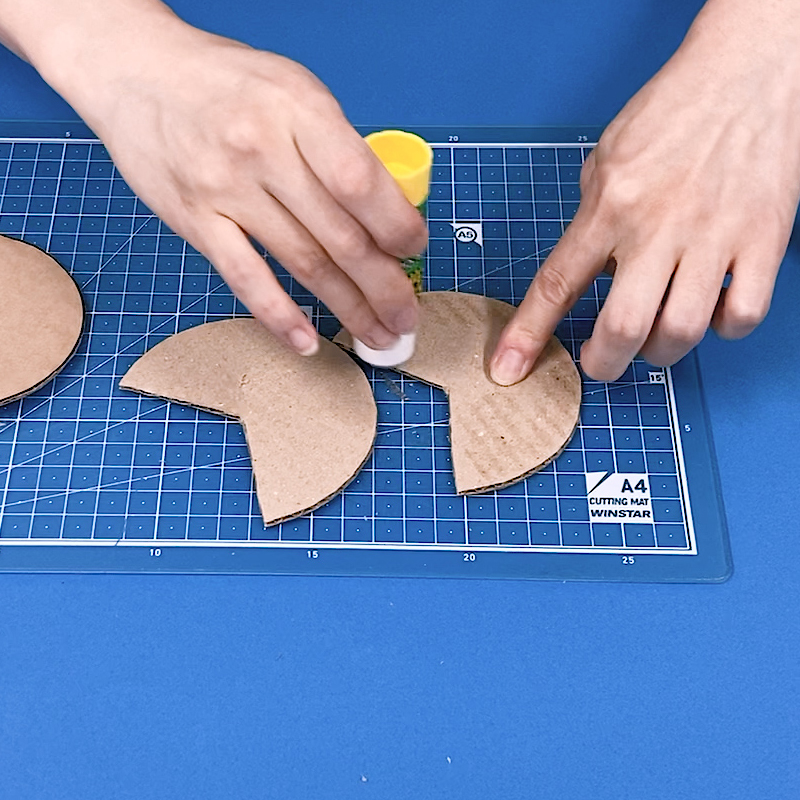
4. 회전판의 받침이 되는 같은 모양의 도안 두 개를 풀로 붙여 줍니다.

5. 상자를 접은 뒤 짧은 날개 4부분을 모두 잘라줍니다.

6. 상자를 접어 한쪽 면은 테이프로 붙여 줍니다.

7. 테이프로 붙인 쪽에 저금통 도안을 풀로 붙입니다.

8. 도안이 잘 붙었으면 회전판이 돌아 동전이 들어갈 부분을 칼로 뚫어줍니다.
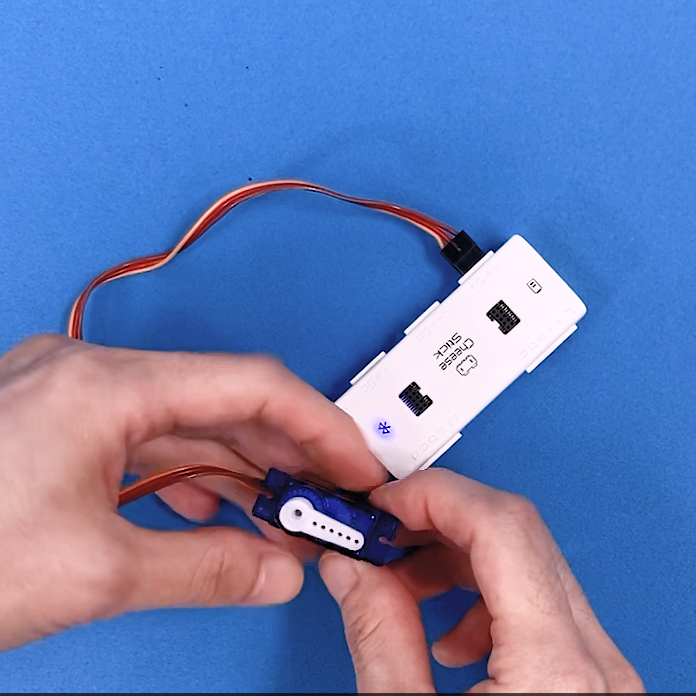
9. 치즈 스틱의 Sa포트에 서보 모터를 연결하고

블록을 활용해 서보 모터의 각도를 0도로 맞춰 줍니다.
그 후 사진과 같이 서보 모터 혼을 꽂아 줍니다.
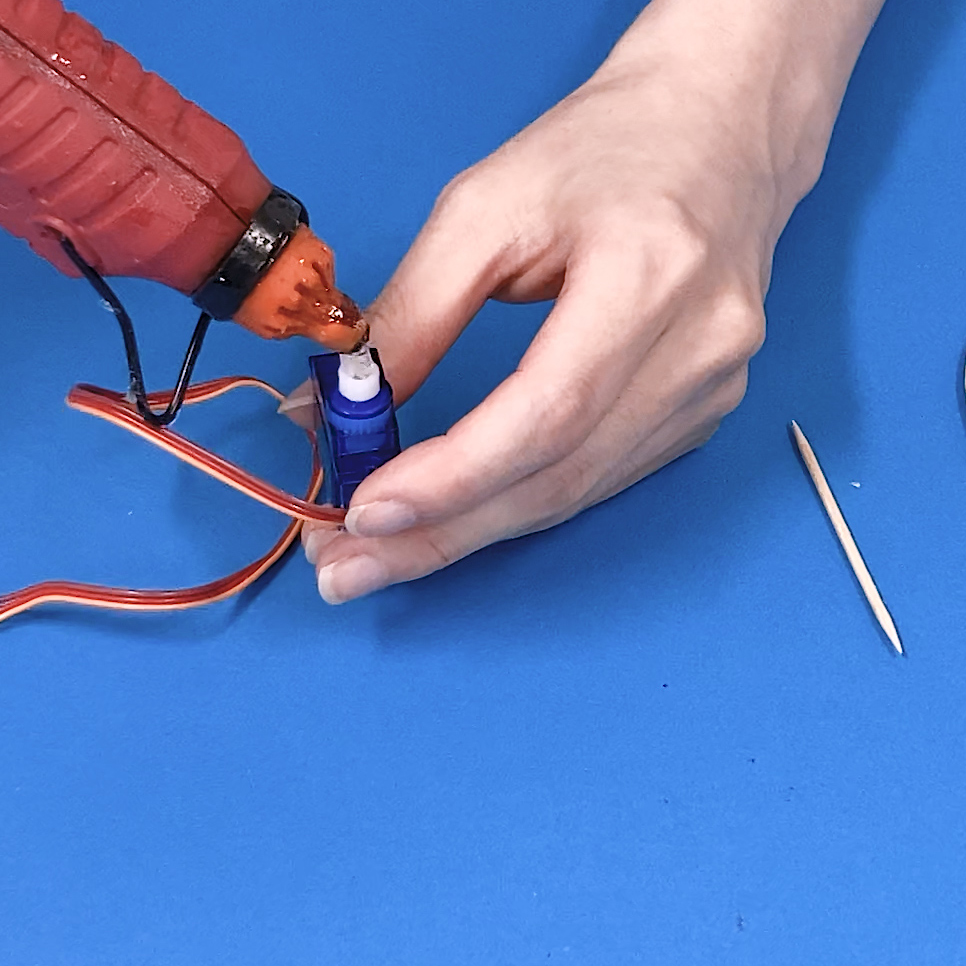
10. 혼이 바른 방향으로 꽂혔다면 이쑤시개를 연결할 수 있도록 혼과 서보모터가 연결된 부분에 글루건을 쏘아줍니다.
글루건을 쏜 부분에 이쑤시개를 꽂고 고정될 수 있도록 잠시 말립니다.
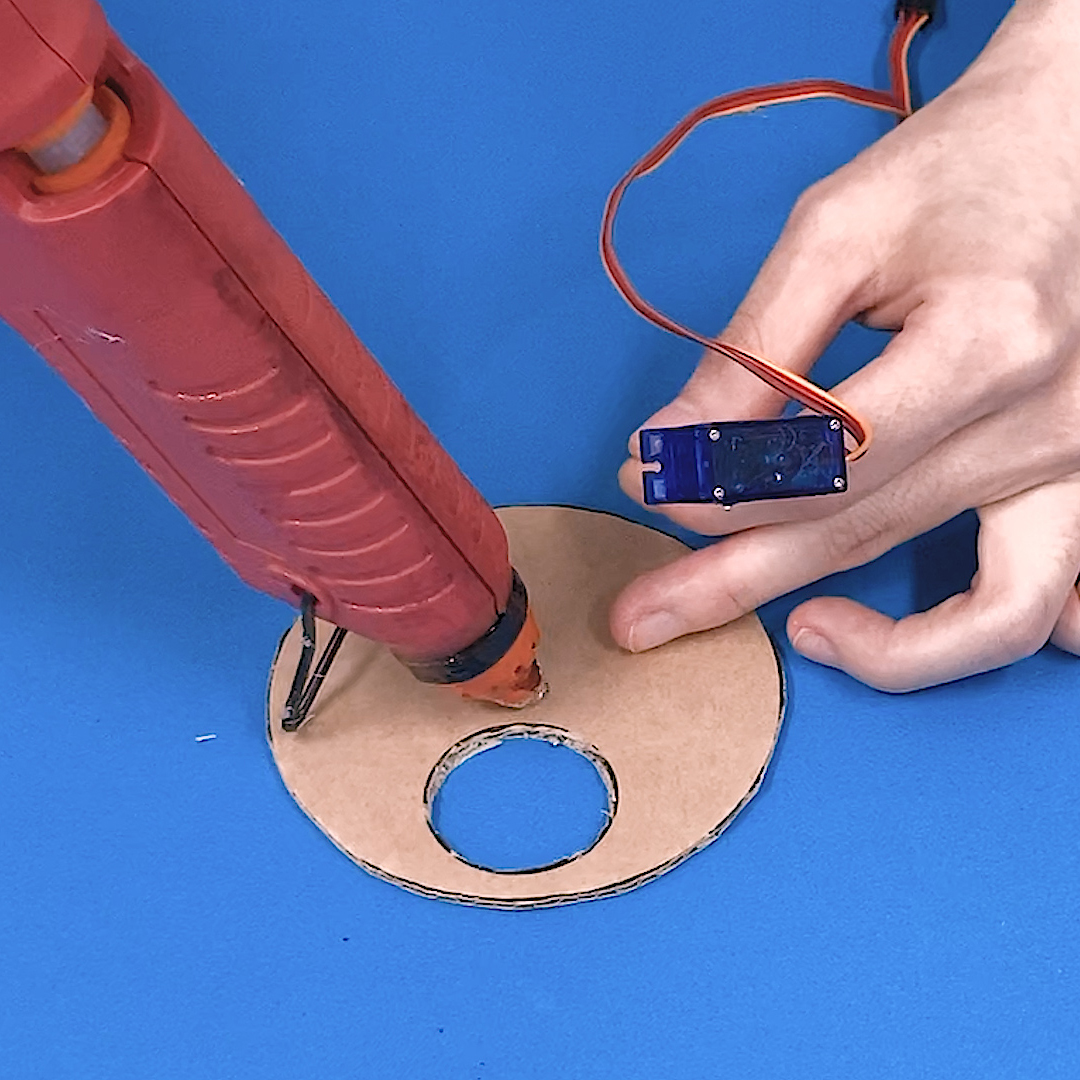
11. 서보 모터에 꽂은 이쑤시개의 반대 방향에 원판을 고정하기 위해 글루건을 쏩니다.
(이쑤시개로 살짝 구멍을 뚫어준 뒤 글루건을 쏘면 이쑤시개를 고정하기가 더 쉽습니다.)

12. 이쑤시개의 끝이 원판을 가리키게 뒤집었을 때 혼이 본인 기분으로 오른쪽을 가리키도록 합니다.
동그랗게 잘라낸 부분이 위쪽을 향하도록 하고 글루건을 쏜 자리에 이쑤시개를 꽂아줍니다.

13. 회전판의 받침 부분을 저금통 안 쪽으로 향하도록 꽂아서 고정해 주세요.
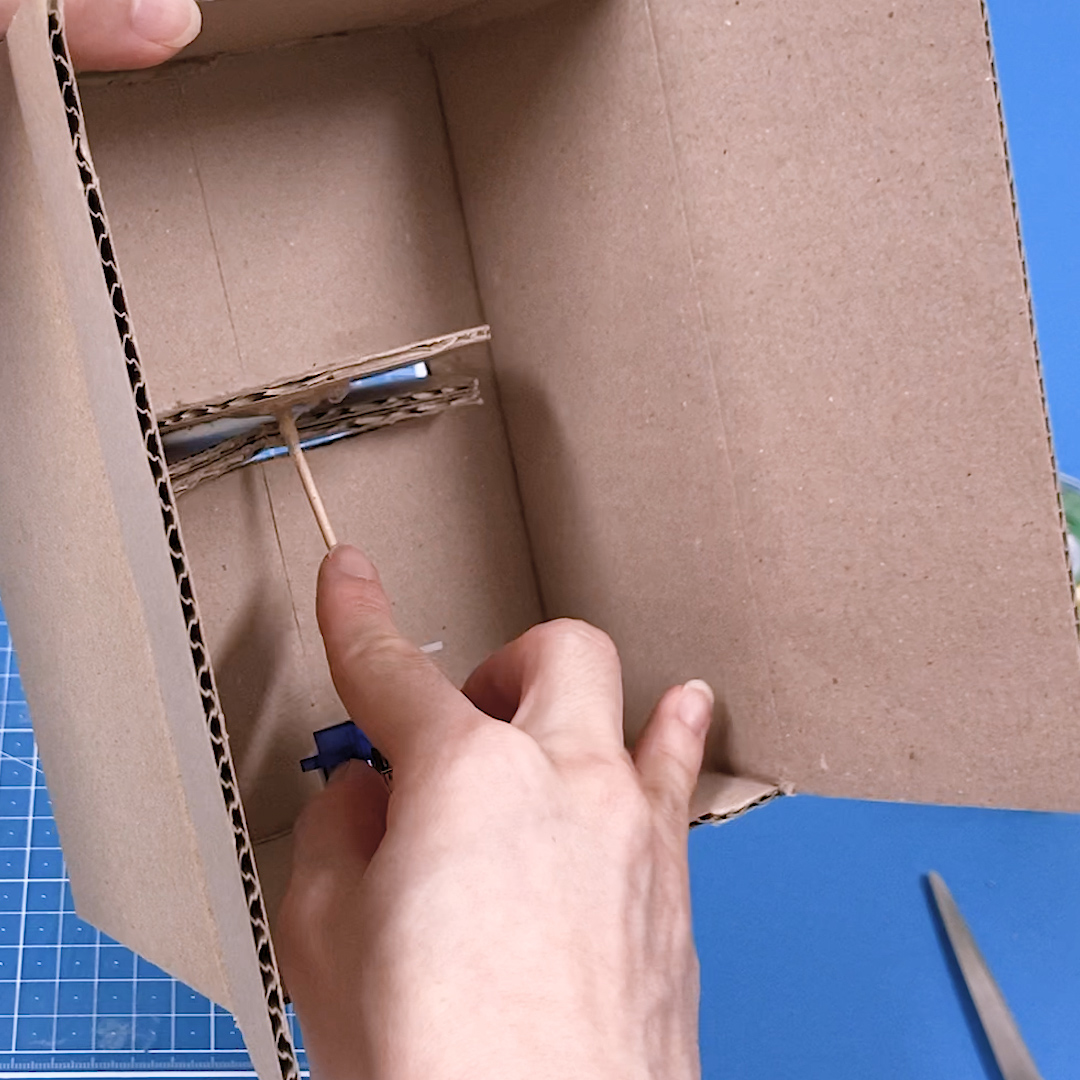
14. 회전판의 동그랗게 구멍이 뚫린 쪽 방향의 서보 모터에 양면테이프를 붙입니다.
저금통 안 쪽에 이쑤시개가 회전판 받침의 홈에 쏙 들어갈 수 있도록 꼼꼼히 붙여줍니다.

15. 로봇 코딩 소프트웨어를 실행한 후 프로그래밍 할 프로그램을 선택해 주세요.

16. 자, 이제 프로그램을 시작합니다!
코딩을 해요.
부품 알기
코딩을 시작하기 전 서보 모터에 대해 자세히 알아봐요!
서보 모터는 모터와 기어박스 그리고 제어회로로 구성되어있어, 특정 위치로 이동하거나, 특정한 수치(속도 등)만큼 가동할 때,
모터로부터의 피드백을 통해 정확하게 제어할 수 있는 구조를 갖추고 있습니다.
때문에 자동화 생산 시스템, 로봇, 장난감, 가전제품 등 광범위하게 쓰이고 있어요.
모터 드라이버가 내장되어 있지 않아 방향을 제어가 까다로운 DC 모터와 스테핑 모터와 달리 서보 모터에는
자체적으로 모터 드라이버가 내장되어 있어서 쉽게 방향을 제어할 수 있습니다.
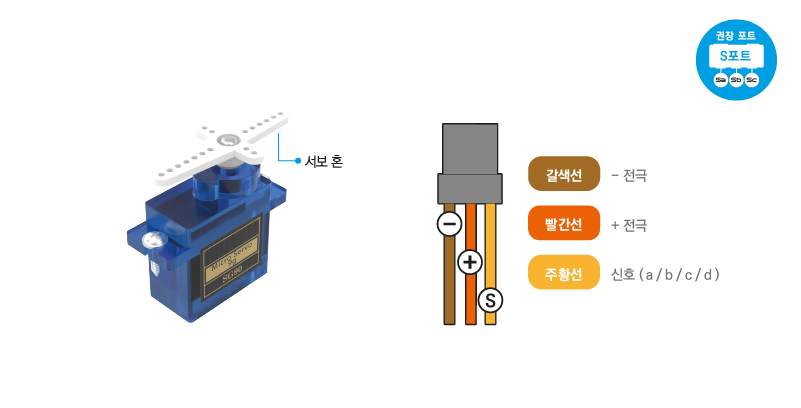
서보 모터에는 3개의 단자가 있습니다. 각각의 단자는 별도의 핀을 알리는 문구가 쓰여 있는 대신 케이블의 색으로 역할을 구분합니다.
일반적으로 3개의 케이블은 검은색(또는 갈색), 붉은색, 황색(또는 주황색, 흰색)으로 표시되어 있으며,
붉은색 선은 +전원, 검은색 선은 -전원에 연결되어 서보 모터에 전기를 공급하는 역할을 하며, 노란색 선은 서보 모터의 동작을 제어하는 신호선입니다.
1. Sc 포트의 입력을 정합니다.
* 아래의 블록들은 연결해서 작성해야 하지만 설명을 위해 분리해 놓았어요.
완성된 코드는 아래에서 확인할 수 있습니다.
스위치를 연결한 포트 Sc의 입력을 ‘버튼’으로 정합니다.

2. 동작 코드를 작성합니다.
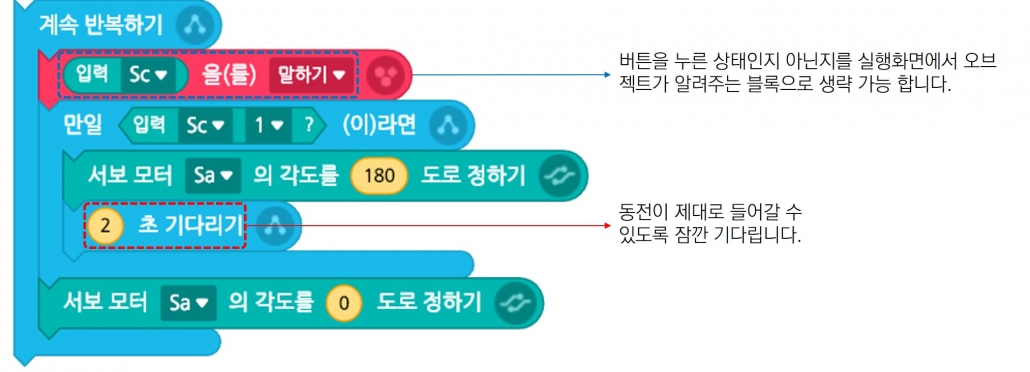
버튼을 누르는 동작은 지속해서 감지할 수 있어야 하므로 ‘계속 반복하기’ 블록을 사용합니다.
‘만일 ~이라면’ 조건문을 활용해 입력 Sc가 1인 경우 즉, 버튼을 누르면 서보 모터가 ‘180도’ 돌아가도록 코드를 작성합니다.
잠깐 기다린 후 모터가 돌아올 수 있도록 각도를 ‘0도’로 정합니다.
3. 완성된 코드는 아래와 같습니다.
동전을 올려놓고 스위치를 눌러 저금통이 제대로 작동하는지 확인해 보아요!
응용하기
서보 모터의 방향 제어 기능을 활용해 응용할 수 있는 다른 방법을 친구들과 논의해 보아요.

