치즈 스틱과 조이스틱, 서보 모터를 활용해 눈동자를 굴리는
고양이를 만들어 보아요.
조이스틱의 PID 버튼2를 누를 때마다 고양이의 표정이
변하도록 코드를 작성해요.


부품을 준비해 주세요.

| 필요 재료 | 수량 |
|---|---|
| 치즈 스틱 본체 | 1개 |
| 조이스틱 | 1개 |
| 서보 모터 | 1개 |
| USB 동글 | 1개 |
| 컴퓨터 | 1대(로봇 코딩 소프트웨어 설치 필요) |
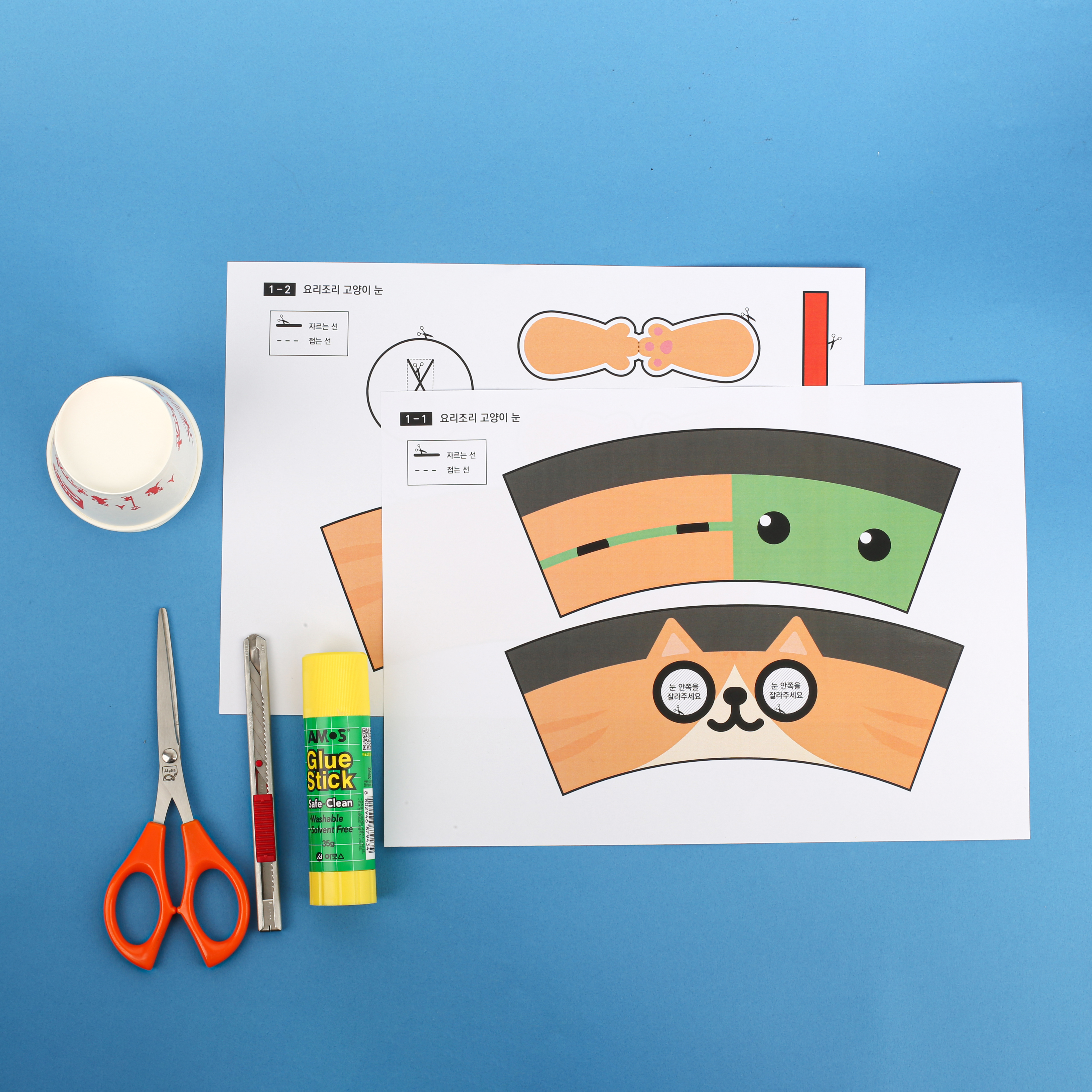
| 고양이 도안 | 가위 | 풀 |
| 테이프, 양면테이프 | 종이컵 | 칼 |

1. 고양이 도안을 인쇄해 모양대로 오려줍니다. 도안은 우측 상단의 활동 도안 다운로드 버튼을 클릭해 다운로드 받으세요.

2. 오려낸 도안을 종이컵 세 개에 각각 붙입니다.

3. 칼로 고양이 얼굴 종이컵의 눈 안쪽을 잘라 눈동자가 보이도록 뚫습니다. 지저분한 부분은 매직으로 아이라인을 그려 깔끔하게 정리할 수 있습니다.

4. 도안 1-2의 동그라미 모양 도안을 고양이 몸통 부분 종이컵의 바닥 바깥쪽에 붙입니다. 풀이 잘 마르면 칼을 가지고 X자 모양으로 잘라낸 뒤 접는 선을 따라 컵 안쪽으로 접습니다.

5. 고양이 몸통 아래 한쪽 측면에 표시된 네모 모양 자르는 선을 따라 칼로 구멍을 뚫어줍니다.
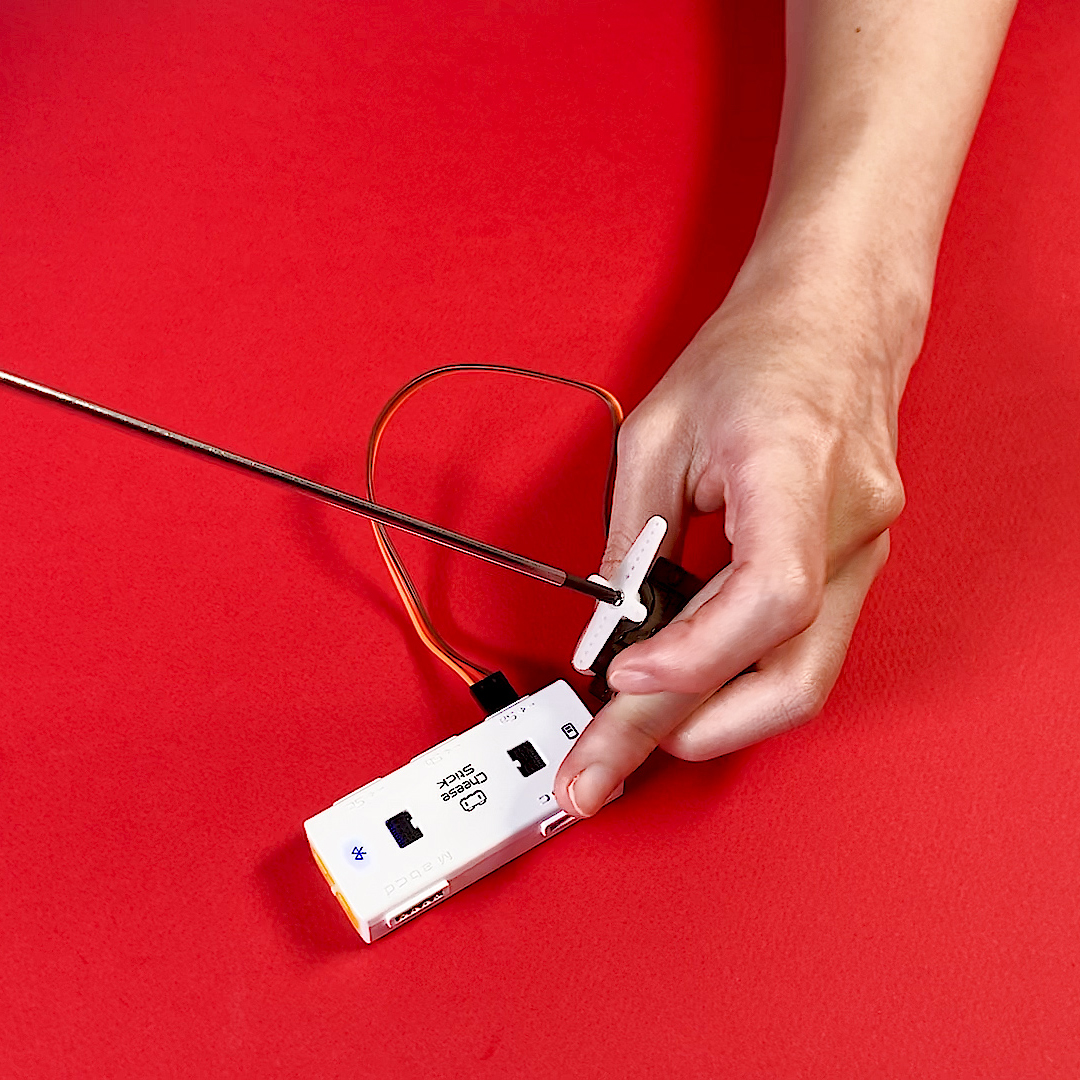
6. 치즈 스틱의 Sa포트에 서보 모터를 연결하고

블록을 활용해 서보 모터의 각도를 0도로 맞춰 줍니다.
그 후 사진과 같이 서보 모터 혼을 꽂고 나사를 박아 조여줍니다.

7. 서보 모터 선을 측면의 작은 구멍으로 꺼냅니다.

8. 고양이 몸통에 뚫어놓은 서보 모터 자리에 모터를 잘 고정해서 꽂아준 뒤 혼에 양면테이프를 붙입니다.

9. 고양이 얼굴 컵과 몸통 컵의 방향 확인 후 테이프를 둘러 연결합니다. 한 번에 다 둘러 붙이기는 힘들 수 있으니 영역을 나눠 여러 번에 걸쳐 붙여 줍니다.

10. 고양이 얼굴 컵 안으로 눈동자 도안을 붙인 컵을 넣어줍니다. 이때 고양이 얼굴 중심에 두 가지 눈동자의 중심이 오도록 맞춰서 넣습니다.

11. 눈동자 컵 바닥과 서보 모터 혼에 붙인 양면테이프가 잘 붙을 수 있도록 꾹꾹 눌러줍니다. 도안에서 고양이의 앞 발과 방울 목걸이를 잘라내 꾸며줍니다.

12. 서보 모터 선을 몸통에 뚫어 놓은 구멍으로 꺼낸 뒤 치즈 스틱의 Sa 포트에 연결합니다. 조이스틱도 L/M 포트에 꽂습니다.

13. 로봇 코딩 소프트웨어를 실행한 후 프로그래밍 할 프로그램을 선택해 주세요.

14. 자, 이제 프로그램을 시작합니다!
코딩을 해요.
부품 알기
코딩을 시작하기 전 서보 모터와 조이스틱에 대해 알아봐요!
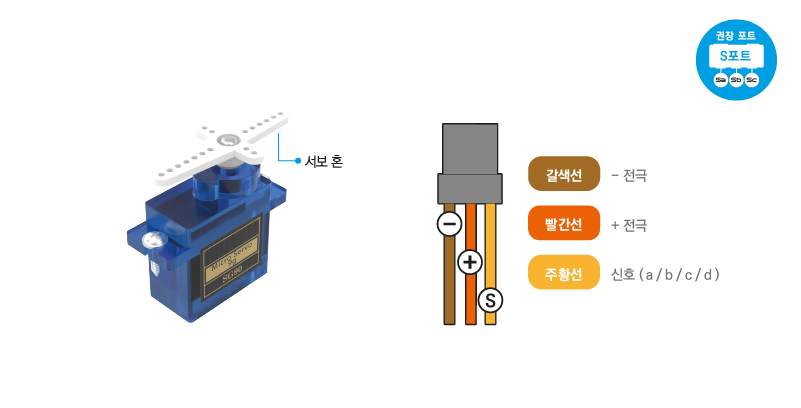
서보 모터에는 3개의 단자가 있습니다. 각각의 단자는 별도의 핀을 알리는 문구가 쓰여 있는 대신 케이블의 색으로 역할을 구분합니다.
일반적으로 3개의 케이블은 검은색(또는 갈색), 붉은색, 황색(또는 주황색, 흰색)으로 표시되어 있으며,
붉은색 선은 +전원, 검은색 선은 -전원에 연결되어 서보 모터에 전기를 공급하는 역할을 하며, 노란색 선은 서보 모터의 동작을 제어하는 신호선입니다.

조이스틱은 상하좌우로 방향을 조종할 수 있는 스틱과 버튼 입력이 가능한 빨간 버튼으로 이루어져 있습니다.
1. 코드에 사용할 속성을 추가합니다.
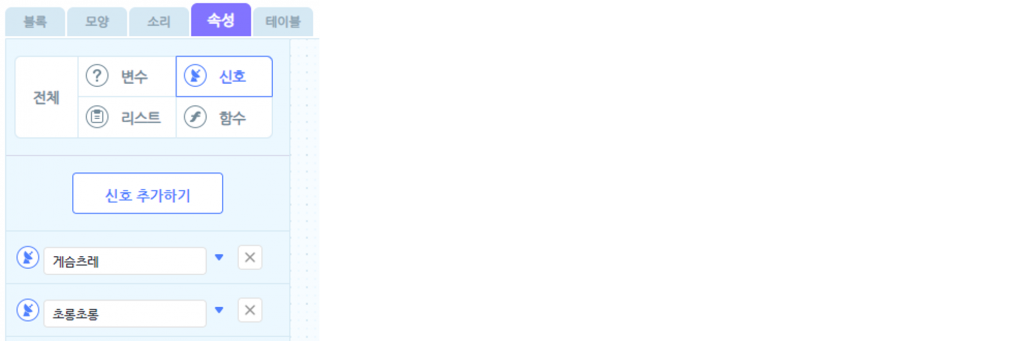
신호 추가하기
각각의 눈동자 모양을 의미하는 신호를 추가합니다.
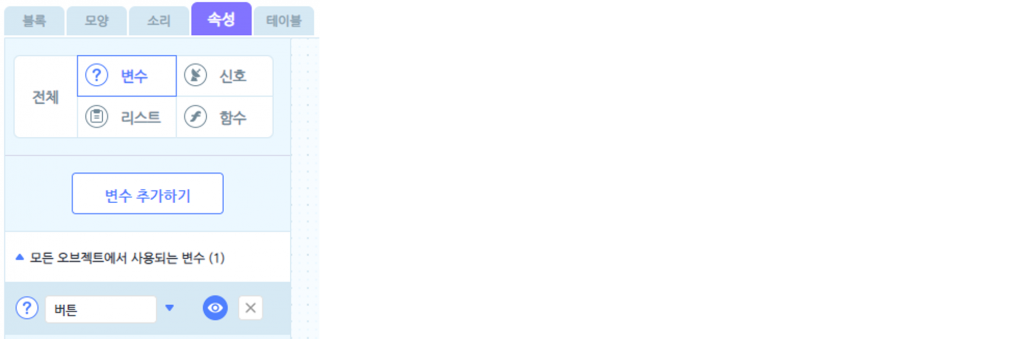
변수 추가하기
조이스틱 PID 버튼2를 누르는 횟수를 셀 변수를 추가합니다.
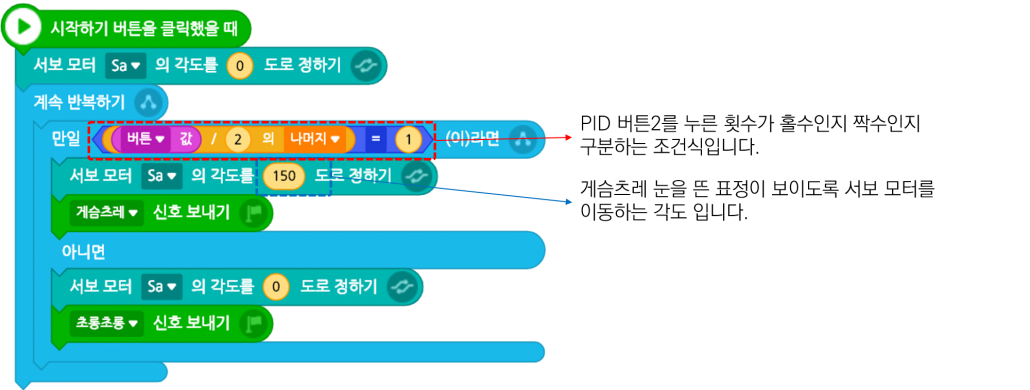
2. 각 표정에 해당하는 신호를 보내는 코드를 작성합니다.
조이스틱 PID 버튼2를 누르는 횟수에 따라 고양이가 다른 표정을 짓도록 신호를 보내는 코드를 작성합니다.
‘만일 ~이라면’ 조건문을 활용해 버튼을 누른 횟수를 2로 나누는 식을 넣어 홀수이면 눈을 게슴츠레 뜨고 짝수이면 초롱초롱하게 뜨도록 합니다.
3. 버튼 변수를 활용한 코드를 작성합니다.
버튼을 클릭할 때마다 버튼 변수의 값이 1씩 더해지는 코드를 작성합니다.

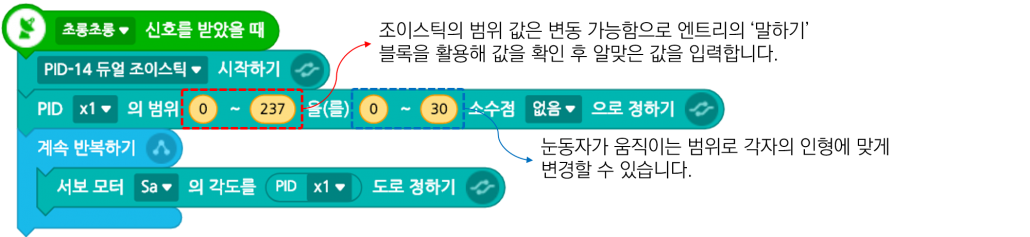
4. 신호를 받아 동작하는 코드를 작성합니다.
초롱초롱 신호
조이스틱의 값에 따라 서보 모터의 각도가 변하도록 코드를 작성합니다.
게슴츠레 신호
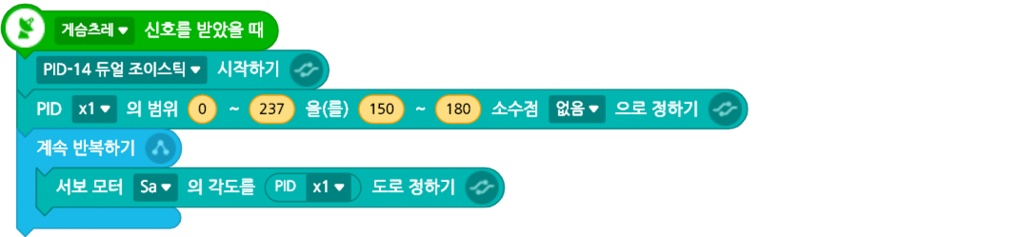
자 이제 여러분이 원하는 대로 고양이의 표정과 눈동자 방향을 바꿔보아요~
응용하기
여러분이 원하는 눈동자 모양을 직접 만들어서 작동해 보아요!

