햄스터와 3D 프린터로 다양한 확장활동을 해보아요!
햄스터의 새로운 움직임을 만들고 관찰해요~

부품을 준비해 주세요.
| 필요 재료 | 수량 |
|---|---|
| 햄스터 S | 1개 |
| 팔 부품 | 2개(3D 프린터로 출력합니다.) |
| USB 동글 | 1개 |
| 컴퓨터 (로봇 코딩 소프트웨어 설치 필요) | 1대 |
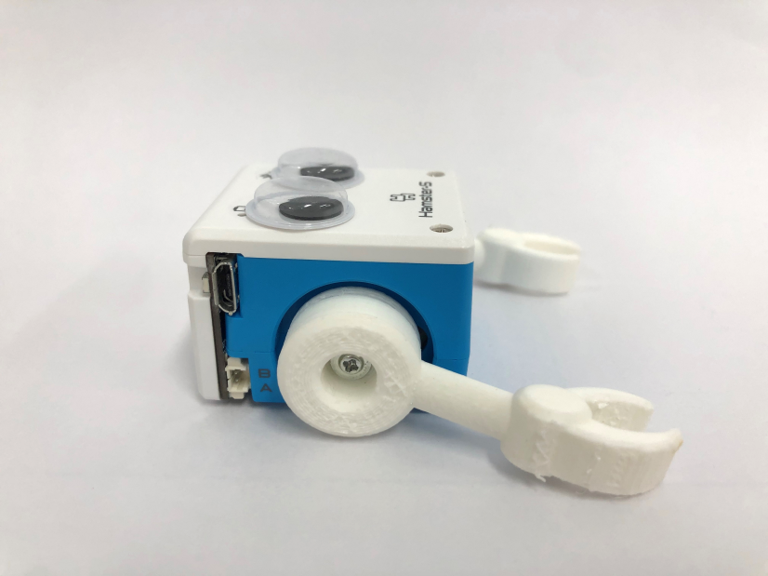
하드웨어를 준비해 주세요.
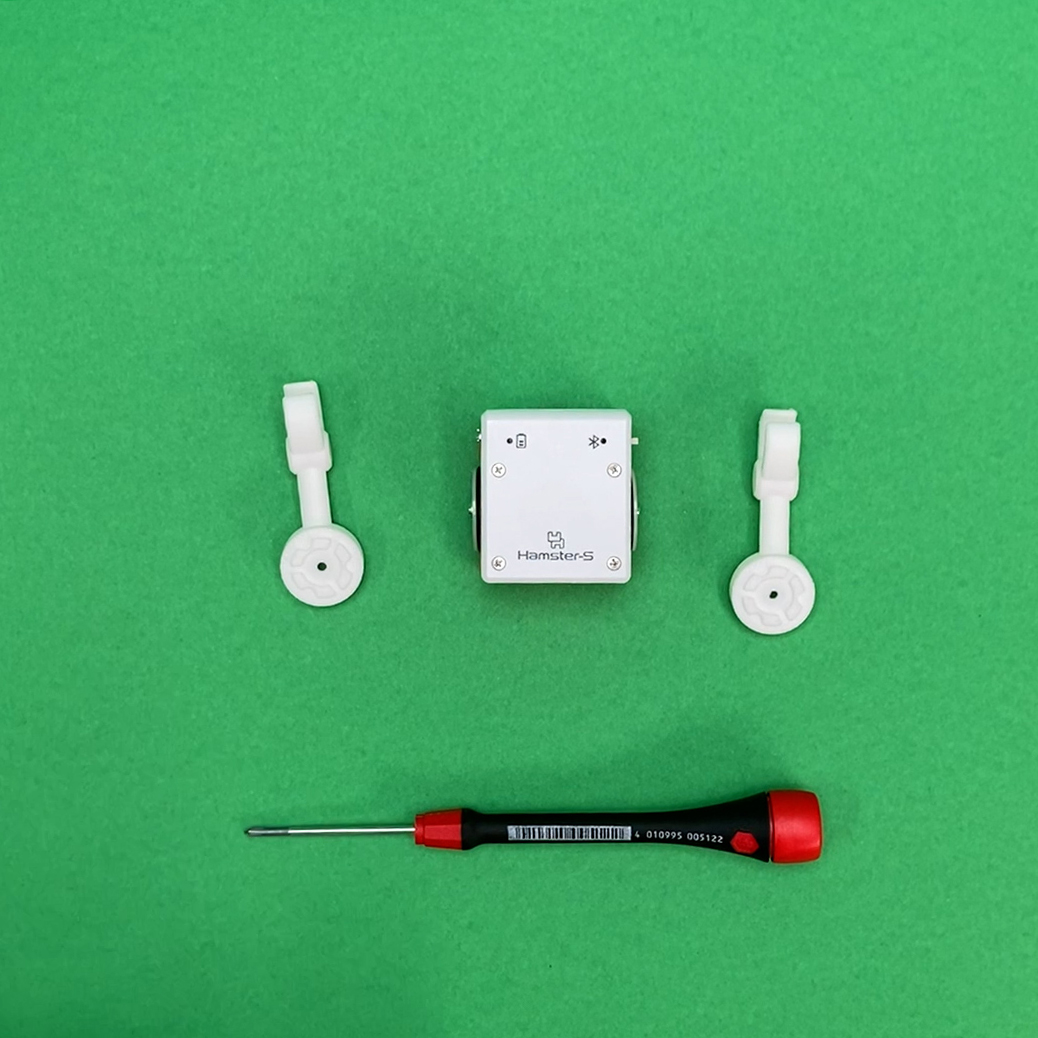
- 3D 프린터로 출력한 팔을 준비합니다.
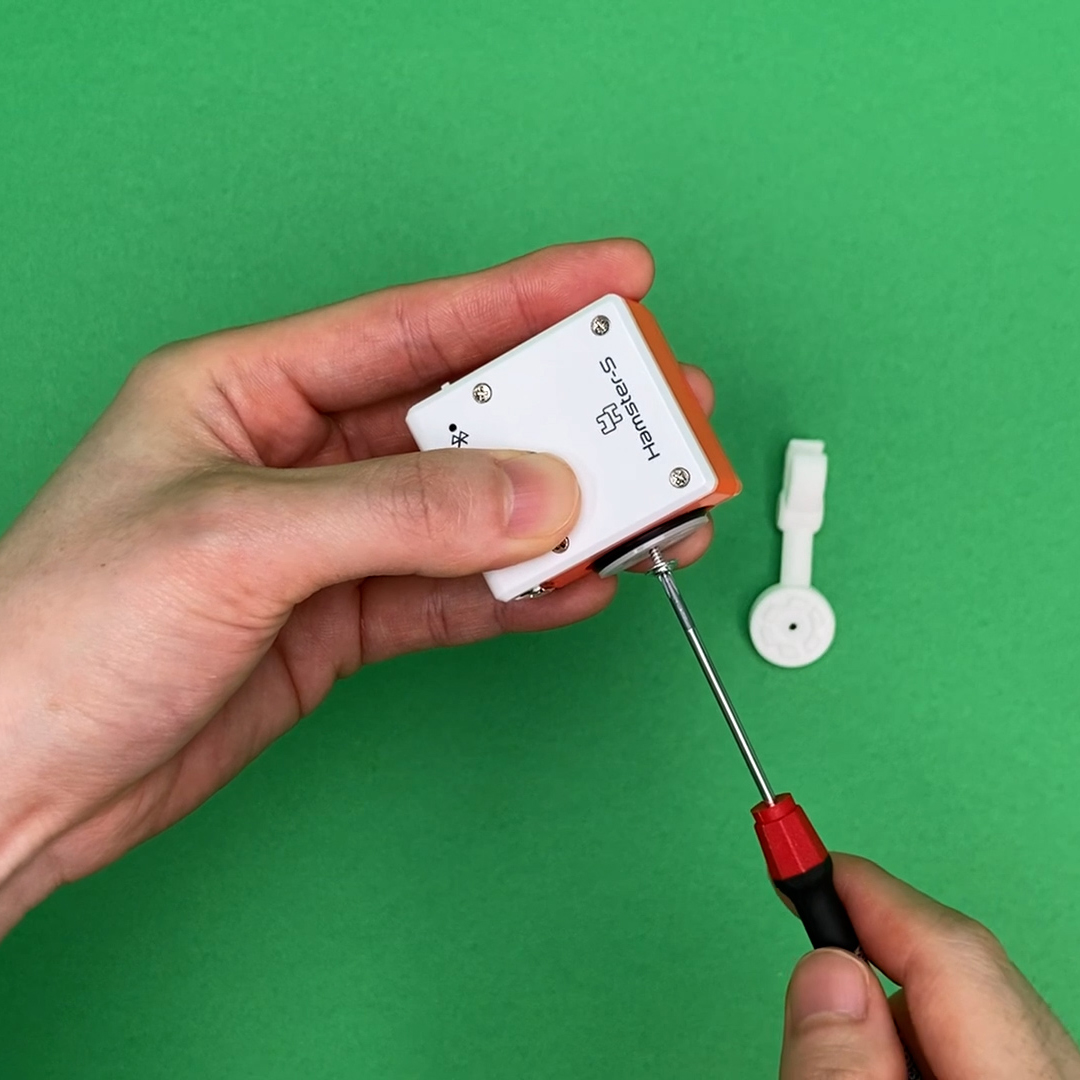
- 햄스터 바퀴의 나사를 풀어줍니다. (나사의 +모양과 크기가 일치하는 드라이버를 사용해 주시기 바랍니다.)
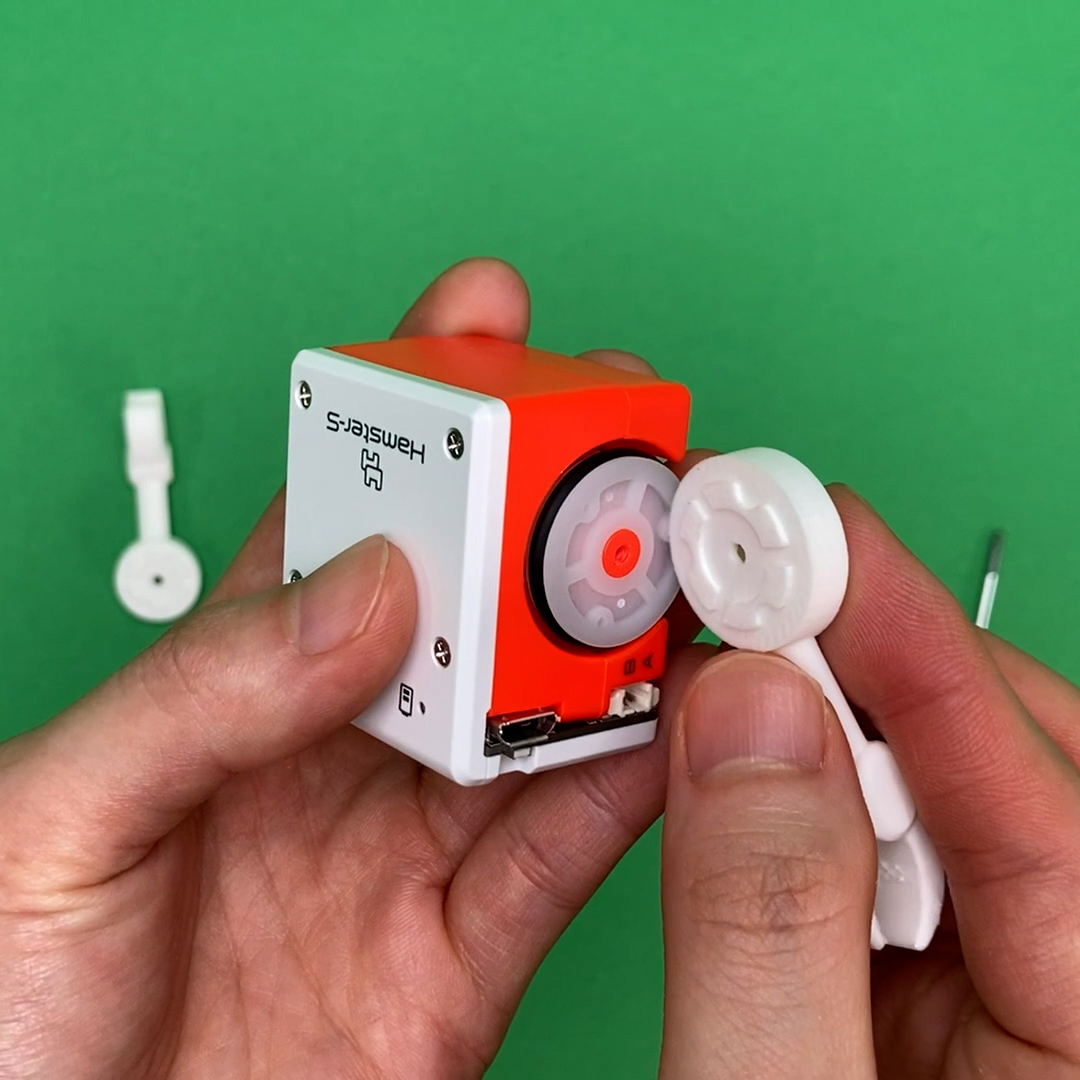
- 바퀴 홈에 맞춰 팔을 끼웁니다.

4. 구멍에 맞춰 나사를 넣고 조입니다. (나사를 너무 꽉 조이면 바퀴가 돌아가지 않으므로 다리를 잡고 움직였을 때 살짝 움직임이 있는 정도로 조여줍니다.)
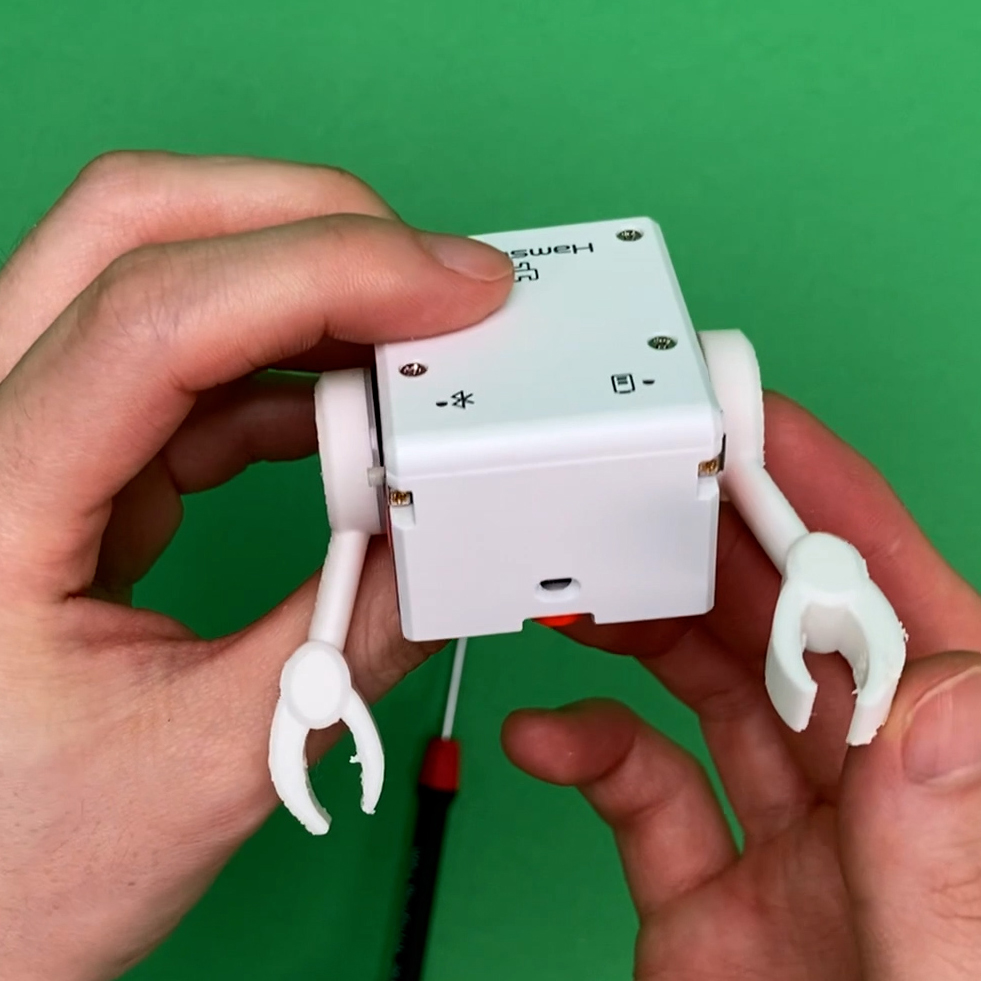
5. 앞의 작업을 반복하여 반대편 팔도 달아줍니다.
코딩을 해요.
코딩 하기
팔 위치 조정하기
햄스터 팔로 다양한 동작을 수행하기 전 팔의 위치를 조정하는 법을 익힙니다.
바퀴 속도로 팔이 움직일 방향과 속도를 조절할 수 있습니다.
기다리는 시간이 늘어나면 팔이 움직이는 범위가 커집니다.
바퀴 값과 기다리기 시간을 바꿔가며 팔이 움직이는 방향과 정도를 조절합니다.

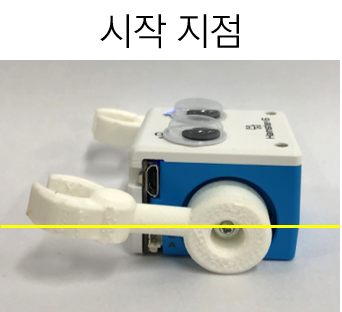
코드 실행 전 방향키를 이용해 아래와 같이 팔을 뒤로 뻗은 자세를 취하도록 합니다.
스프라이트를 추가하여 스프라이트를 클릭하면 지정된 동작을 수행하도록 합니다.
스프라이트는 여러분이 원하는 모양으로 자유롭게 추가하면 됩니다.

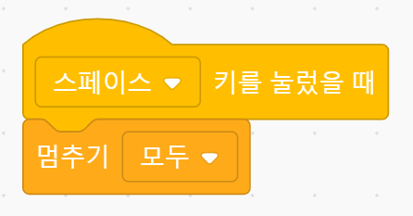
스프라이트를 클릭하면 실행하는 동작이 스페이스 키를 누르면 멈추는 코드를 작성합니다.
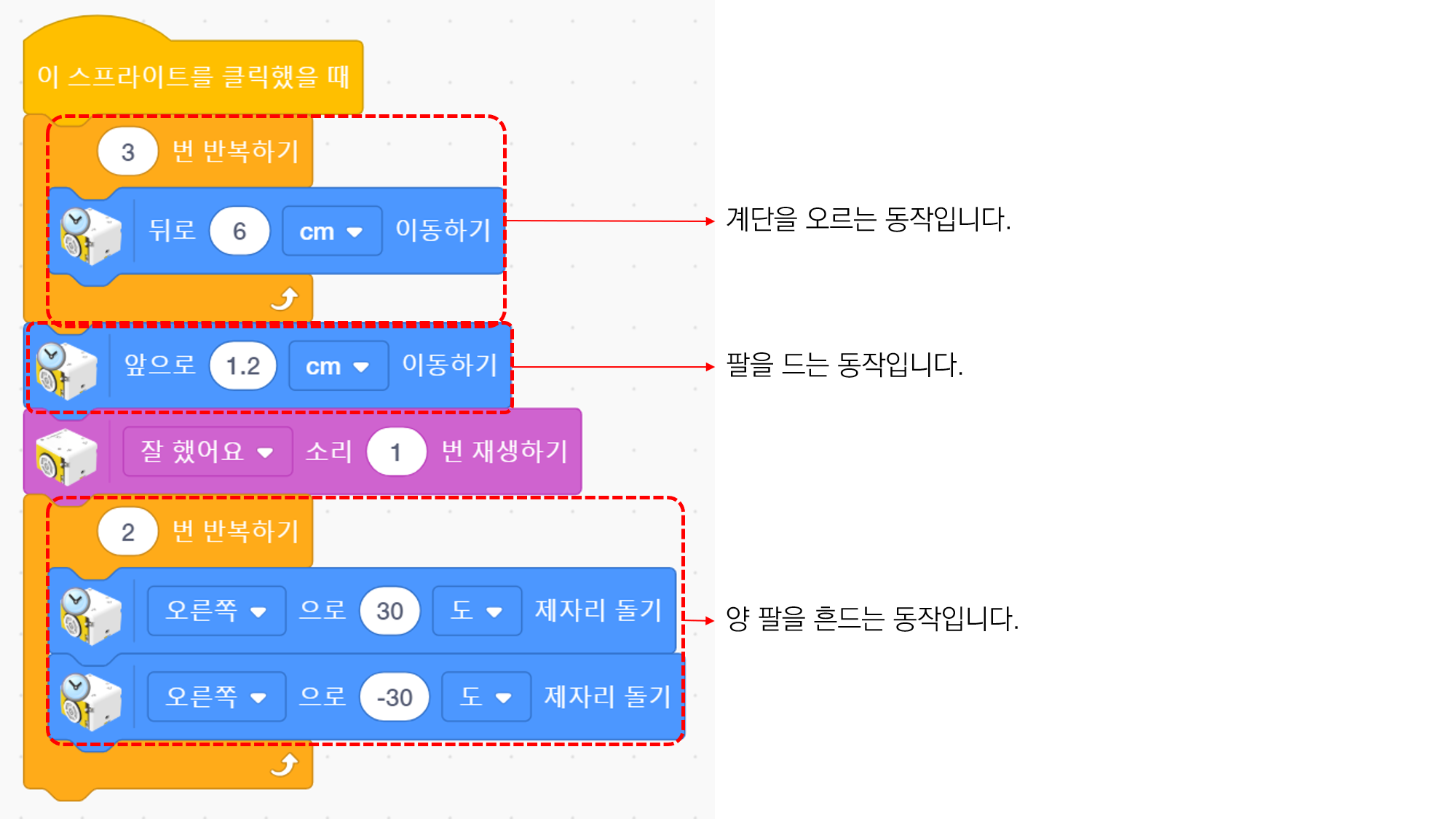
1. 계단오르기 코드를 작성합니다.
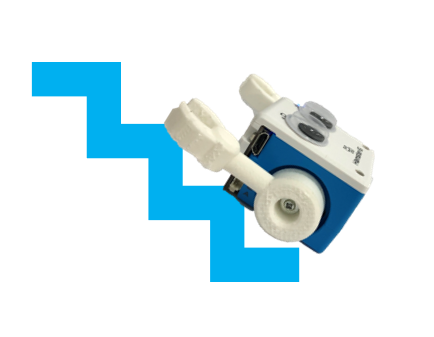
햄스터를 계단 앞에 바짝 붙여놓은 뒤 계단오르기 스프라이트를 클릭하면 햄스터가 계단을 오르는 코드입니다.
바닥이 미끄러울 때는 햄스터의 앞부분을 계단 위에 살짝 걸쳐놓고 동작을 시작합니다.
2. 일어나기 코드를 작성합니다.
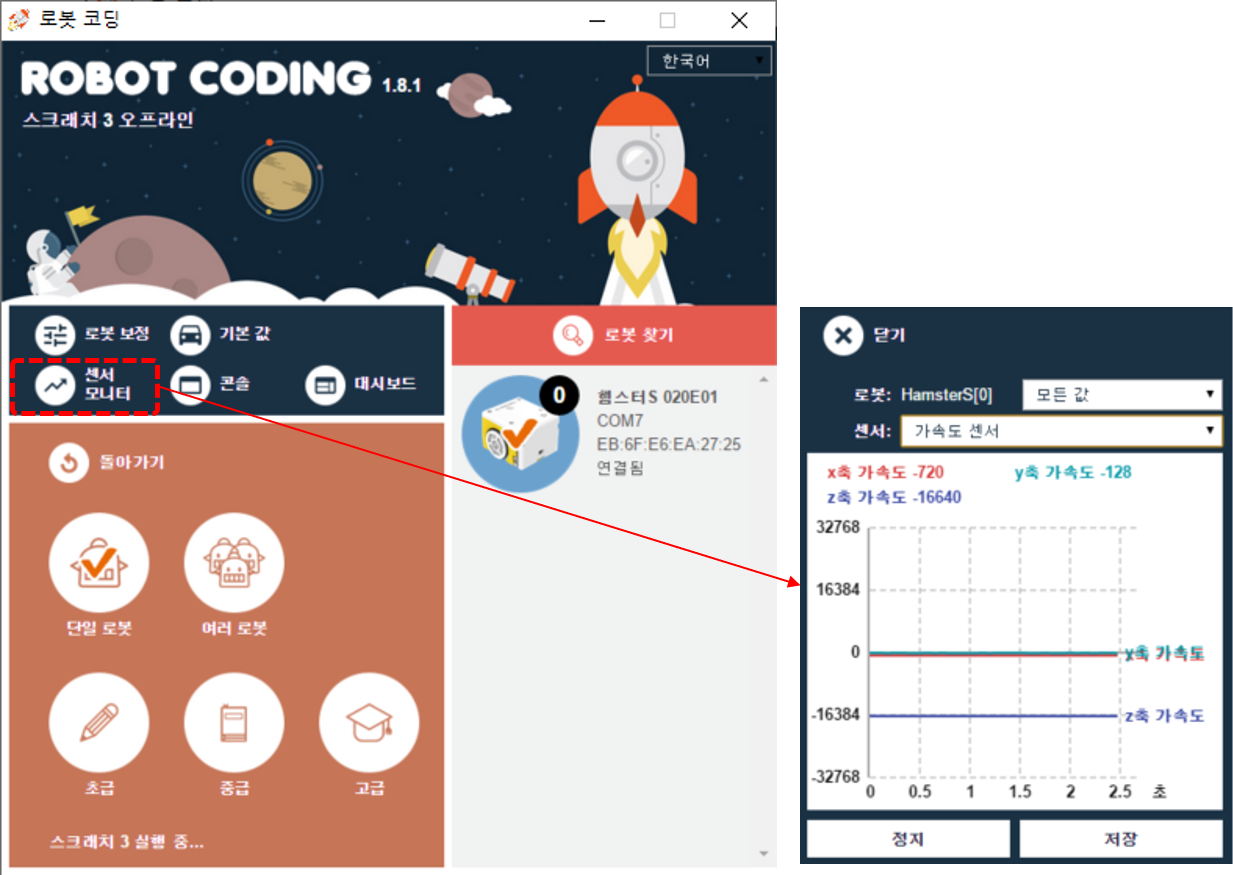
3축 가속도 센서의 z축 가속도 값을 활용해 햄스터가 똑바로 서 있지 않은 상황을 감지합니다.
가속도 센서의 값은 말하기 블록을 활용하거나 로봇 코딩의 센서 모니터에서 확인할 수 있습니다.
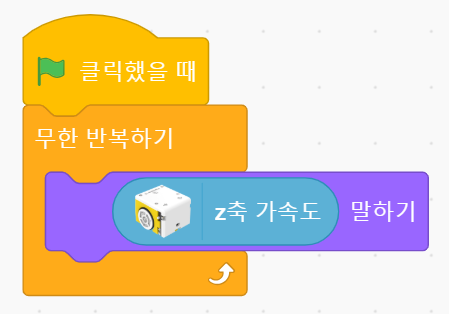
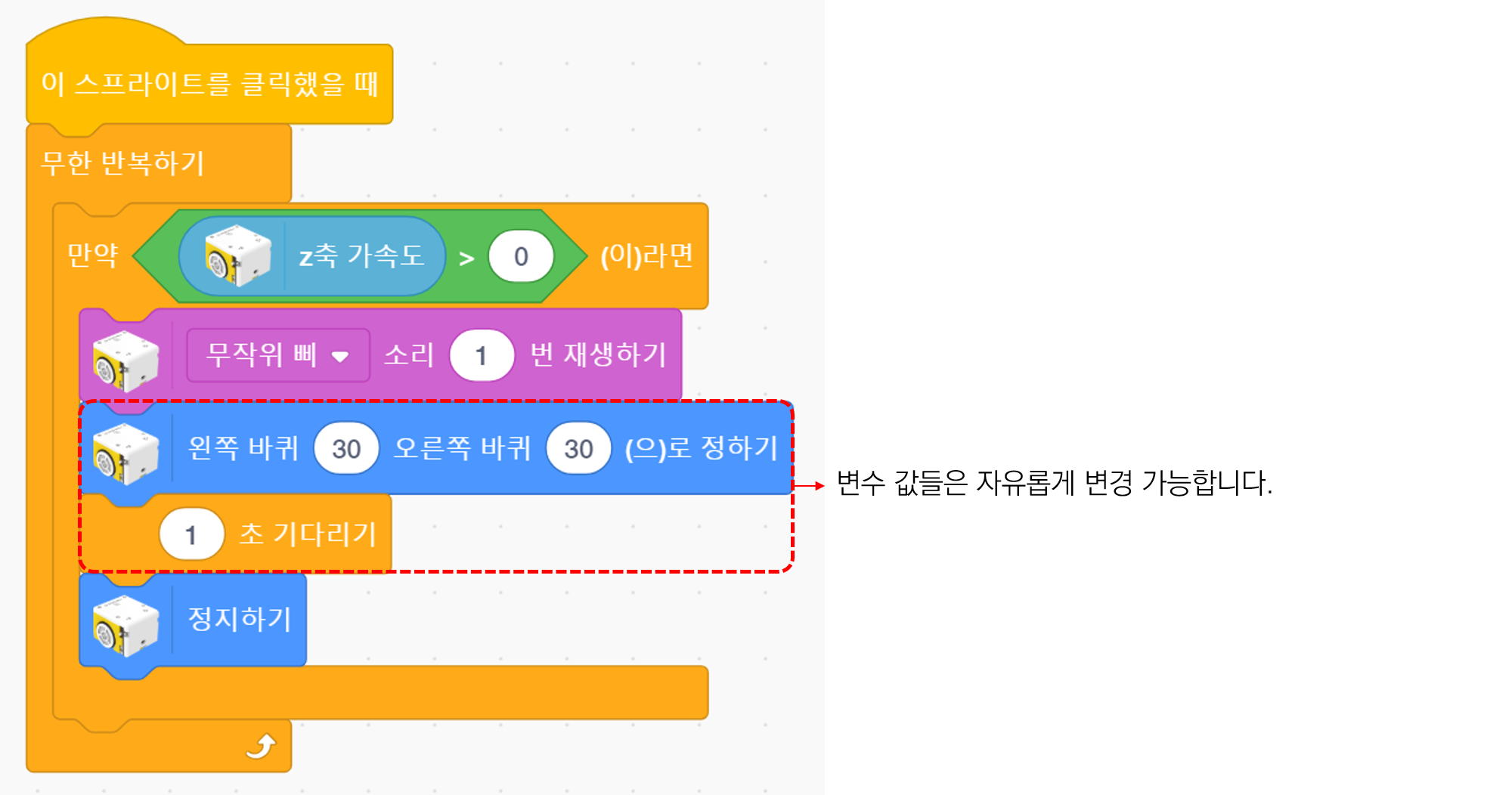
일어나기 스프라이트입니다.
햄스터가 똑바로 있을 때 z축 가속도 값은 -16000 이하이므로 z축의 값이 양수가 되었을 때 햄스터가 몸을 뒤집는 동작을 하도록 코드를 작성합니다.
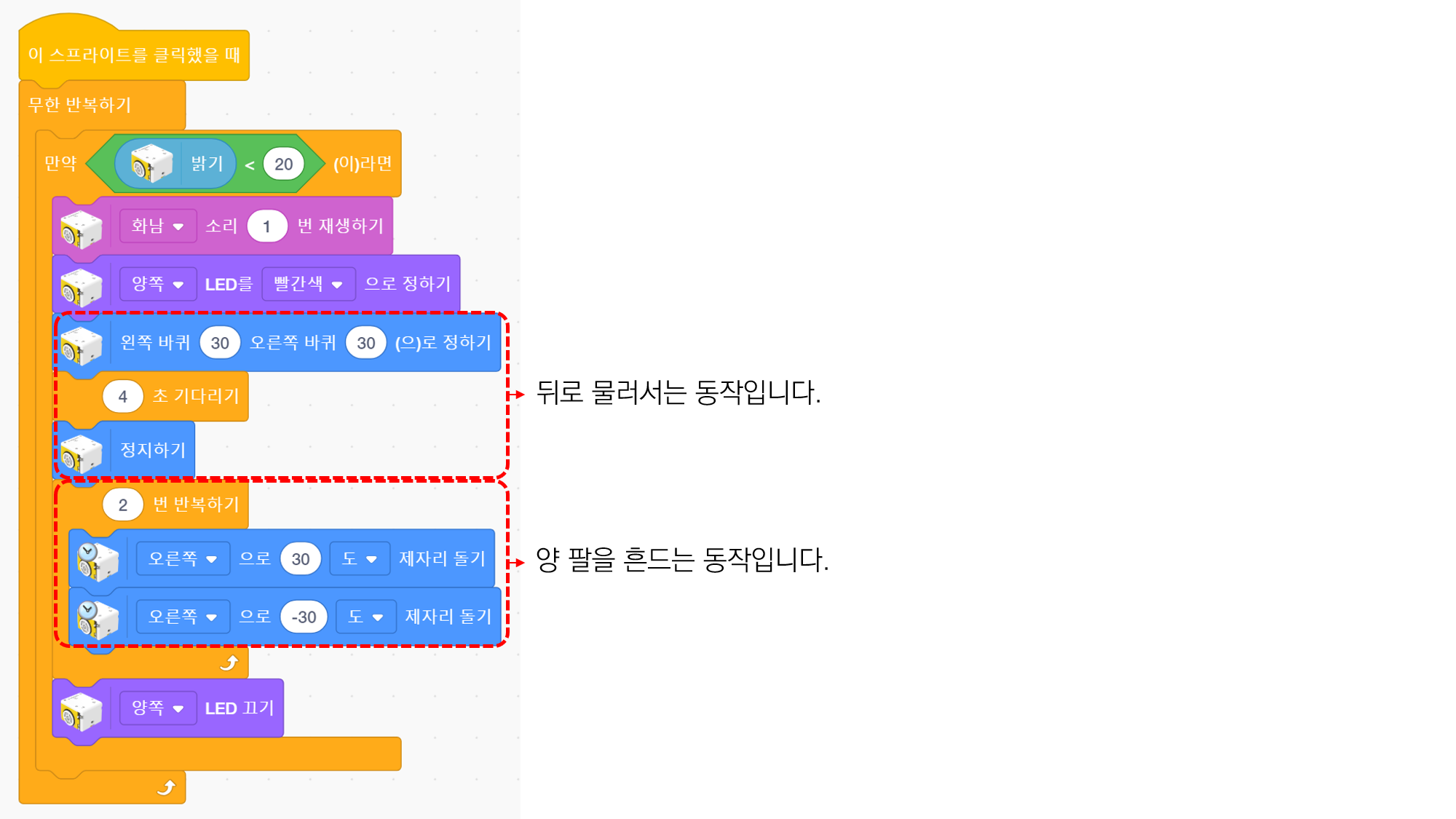
3. 화내기 코드를 작성합니다.
조도 센서의 값도 말하기 블록과 로봇 코딩의 센서 모니터를 활용해 값을 확인할 수 있습니다.
조도 센서 값은  블록으로 확인합니다.
블록으로 확인합니다.
화내기 스프라이트 입니다.
이번에는 밝기 값이 20보다 작으면 동작을 실행하도록 구성하였습니다.
조도 센서를 가리면 햄스터가 뒤로 넘어가 팔을 휘저으며 화를 내는 코드를 작성합니다.
응용 하기
코드를 변형해 여러분들 만의 움직임을 만들고 친구들과 비교해 보아요!

