햄스터 AI 카메라와 치즈 스틱, 스크래치의 손 찾기를 활용해 보아요.
스크래치의 손 찾기 기능으로 손의 움직임을 감지해요.
치즈스틱과 서보모터로 로봇 손을 움직여요.


부품을 준비해 주세요.
| 필요 재료 | 수량 |
|---|---|
| 치즈 스틱 | 1개 |
| 햄스터 AI 카메라 | 1개 |
| 서보 모터 | 5개 |
| USB 동글 | 1개 |
| 무선 네트워크 어댑터 | 1개 |
| 컴퓨터 | 1대 |
하드웨어를 준비해요.
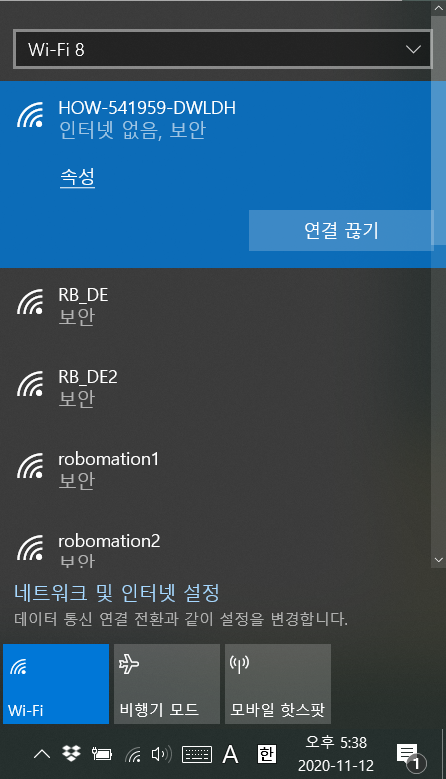
1. 햄스터 AI 카메라를 무선 네트워크 어댑터에 연결합니다.

2. 로봇 코딩 소프트웨어에서 스크래치3를 선택해 접속합니다.
코딩을 해요.
알고 가기
코딩을 시작하기 전 스크래치에서 카메라를 활용하는 방법은 아래 버튼을 클릭하면 이동하는 페이지에서 확인합니다.
코딩 하기
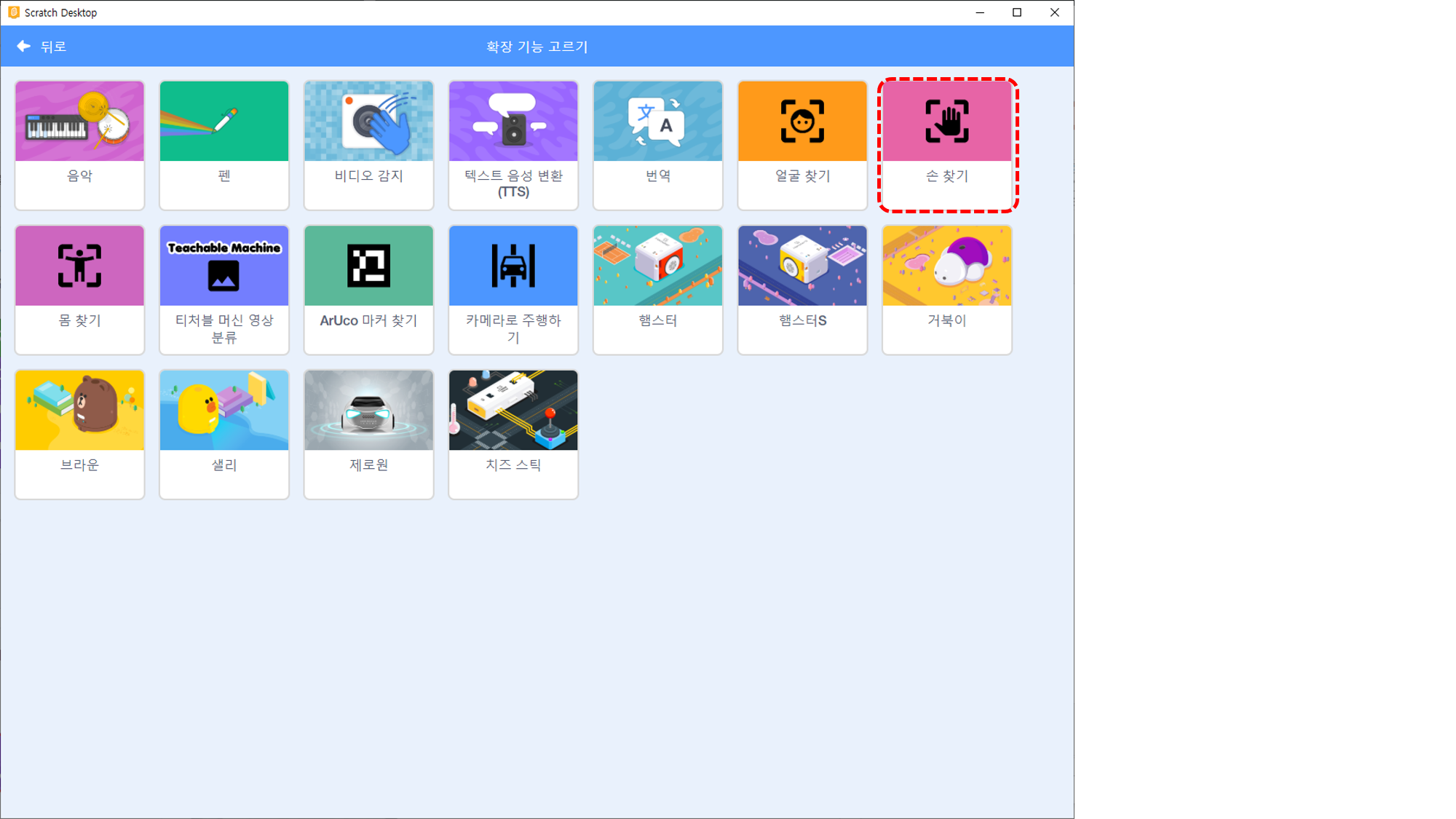
1. 코드에 사용할 블록을 추가합니다.
확장 기능 추가하기![]() 에서 ‘손 찾기’를 추가합니다.
에서 ‘손 찾기’를 추가합니다.
* 아래의 블록들은 연결해서 작성해야 하지만 설명을 위해 분리해 놓았어요.
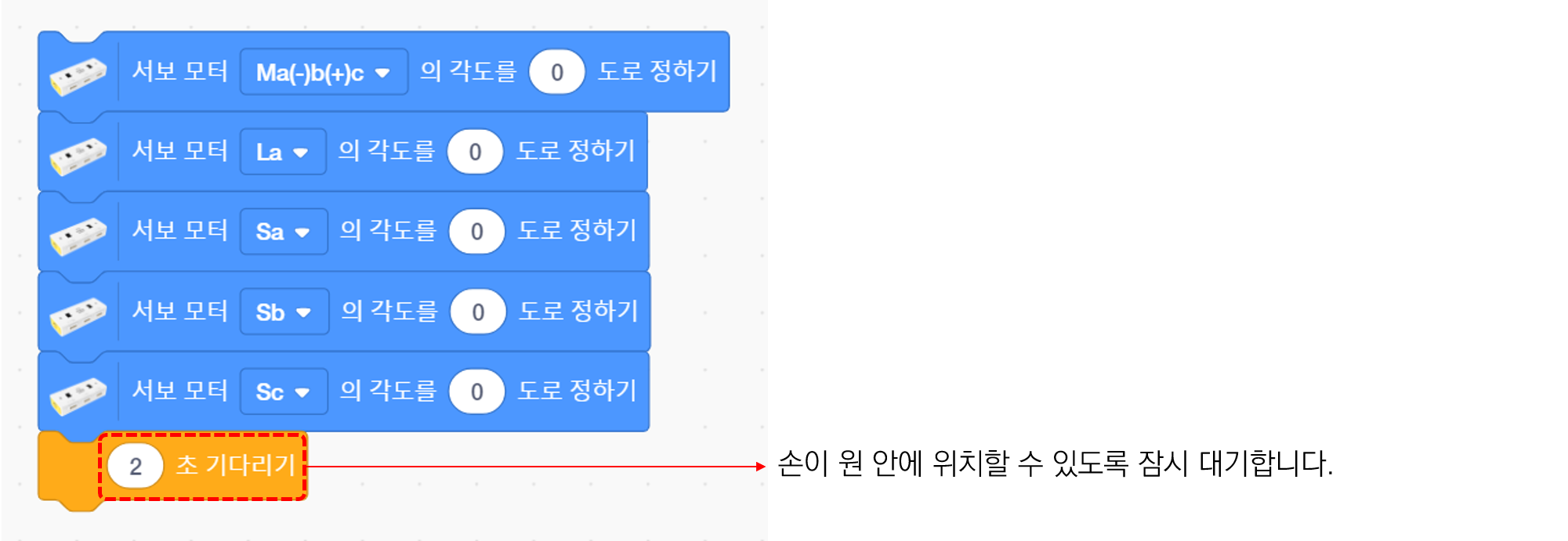
2. 동작을 준비하는 코드를 작성합니다.
손 찾기를 시작하고 연결된 서보모터의 값을 초기화하는 블록을 가져와 코드를 작성합니다.

3. 서보모터의 움직임을 지시하는 코드를 작성합니다.
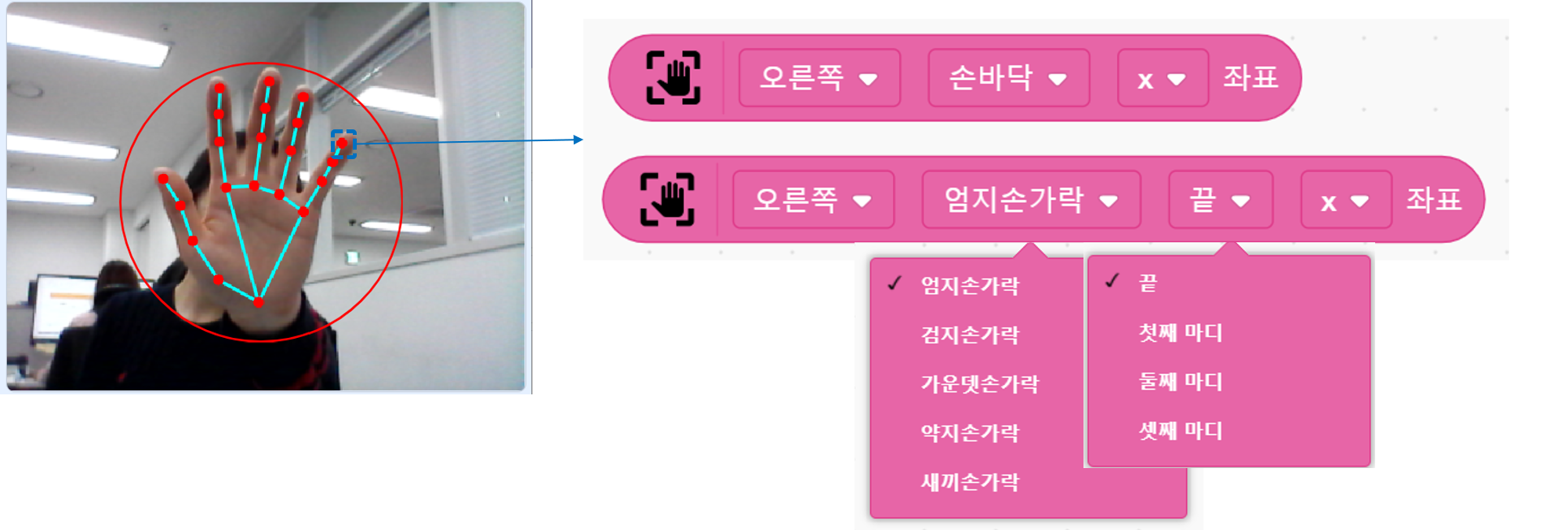
손 찾기를 시작하면 아래와 같이 실행 화면에 나타난 신체 위에 점과 선으로 감지 결과가 나타납니다.
오른쪽 블록들을 활용하여 손바닥과 손가락 위에 나타나는 각 점의 좌표값을 가져올 수 있습니다.
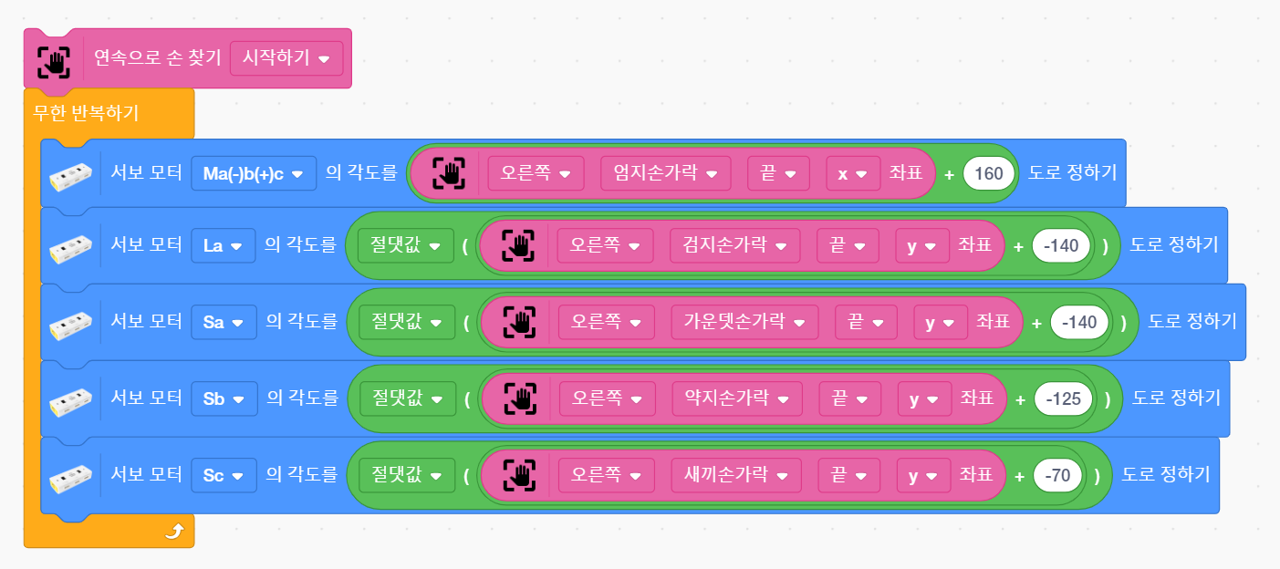
실시간으로 손의 좌표 값을 활용해야 하므로 ‘무한 반복하기’ 블록을 사용합니다.
엄지손가락은 왼쪽에서 오른쪽으로 접히므로 x좌표를 활용하여 서보모터의 값을 조정합니다.
나머지 손가락은 위아래 움직임을 반영하므로 y좌표를 활용합니다.
x좌표와 y좌표에 더하는 상수값은 실행 환경에 맞춰 자유롭게 변경 가능합니다.
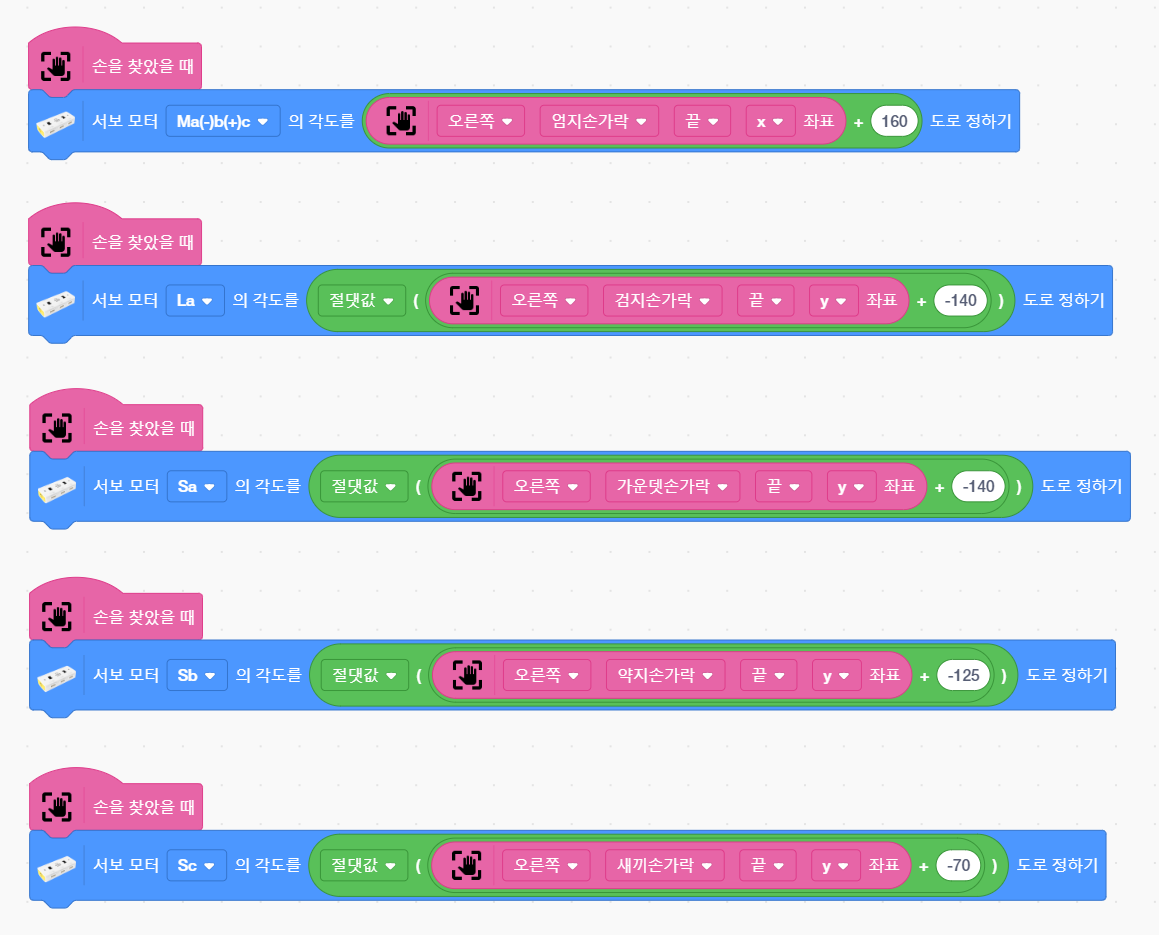
무한 반복하기 내 코드는 아래와 같이 작성할 수도 있습니다.
4. 완성된 코드는 아래와 같습니다.
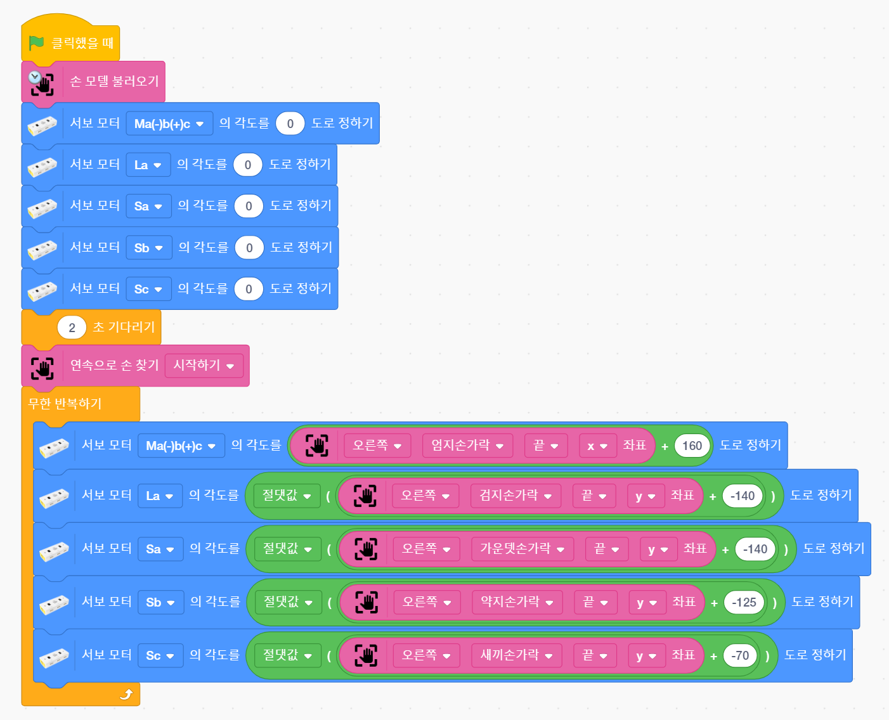
내 손의 움직임으로 로봇 손을 조종해 보아요!
응용하기
손 찾기의 다양한 좌표값을 활용해 여러분 만의 코드를 작성해 보아요.

