햄스터와 3D 프린터로 다양한 확장활동을 해보아요!
햄스터AI카메라로 인공지능 프로그래밍을 해요~

부품을 준비해 주세요.
| 필요 재료 | 수량 |
|---|---|
| 햄스터 S | 1대 |
| 3D 프린터 카트 | 1개 |
| 햄스터 또는 햄스터S 바퀴 | 2개 |
| 그리퍼 | 1개 |
| USB 동글 | 1개 |
| 컴퓨터 (로봇 코딩 소프트웨어 설치 필요) | 1대 |
| 필요 재료 | 수량 |
|---|---|
| 햄스터 S | 1대 |
| 실과키트 | 1개 |
| 빨대 | 1개 |
| 굵은 고무줄 | 1개 |
| 자석 | 1개 |
| USB 동글 | 1개 |
| 컴퓨터 (로봇 코딩 소프트웨어 설치 필요) | 1대 |
하드웨어를 준비해 주세요.

- 3D 프린터로 출력한 카트를 준비합니다.

- 햄스터 바퀴의 나사를 풀어줍니다. (나사의 +모양과 크기가 일치하는 드라이버를 사용해 주시기 바랍니다.)

- 카트 옆면에 바퀴를 끼웁니다.

4. 구멍에 맞춰 나사를 넣고 조입니다. (바퀴가 돌아갈 수 있도록 나사를 너무 꽉 조이지 않도록 합니다.)

5. 앞의 작업을 반복하여 반대편 바퀴도 달아줍니다.
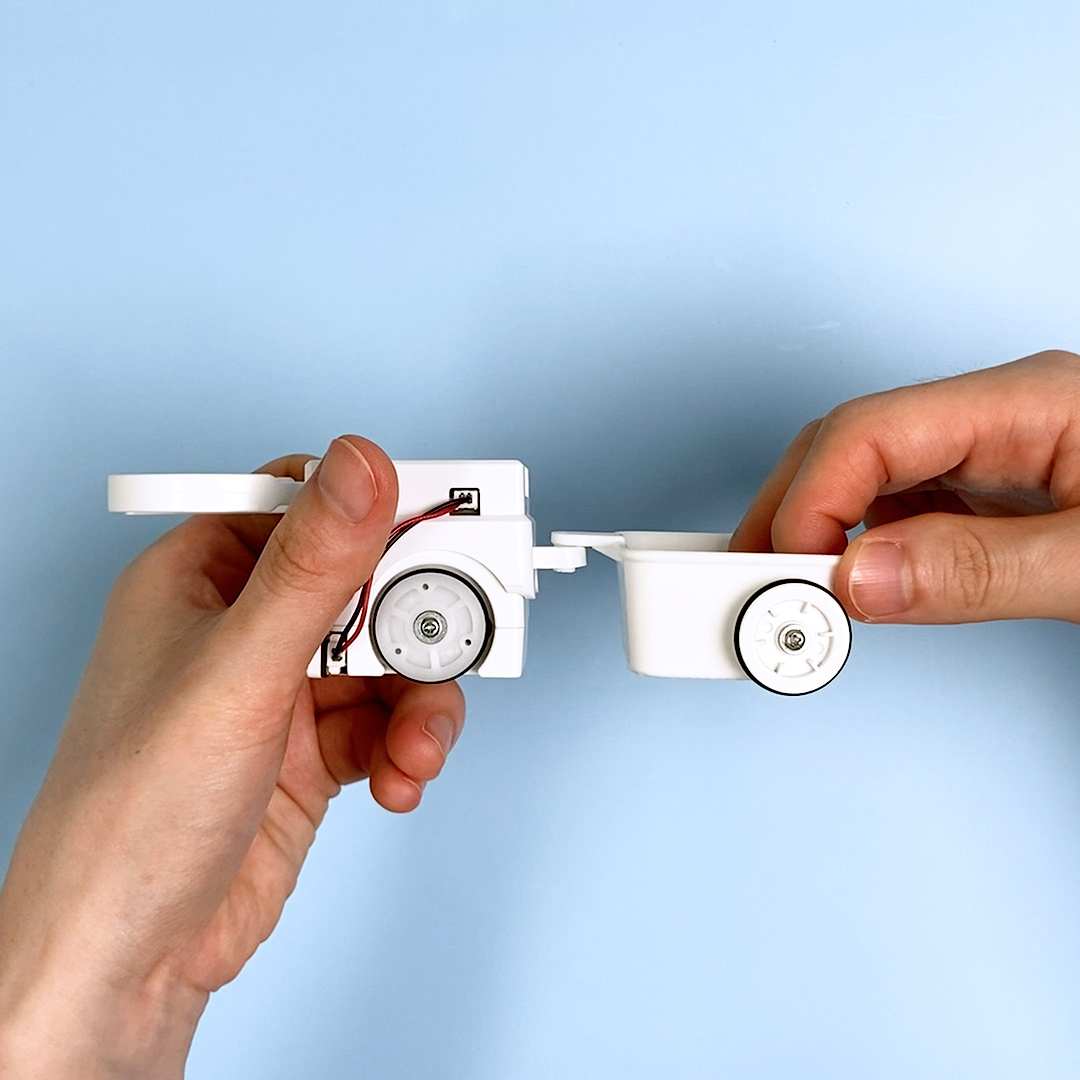
6. 햄스터에 그리퍼를 씌우고 뒤쪽 구멍에 카트의 연결 부분을 꽂아 완성합니다.
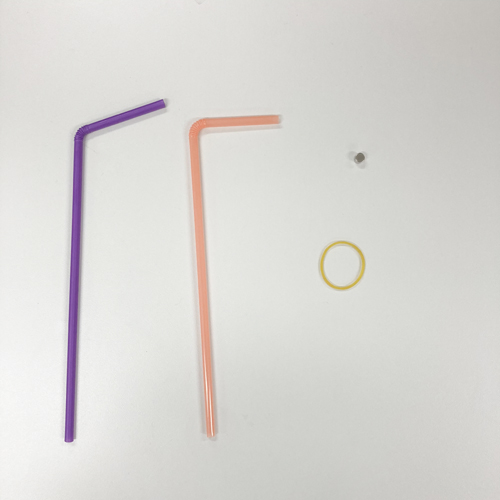
7. 빨대와 고무줄, 자석을 준비합니다.
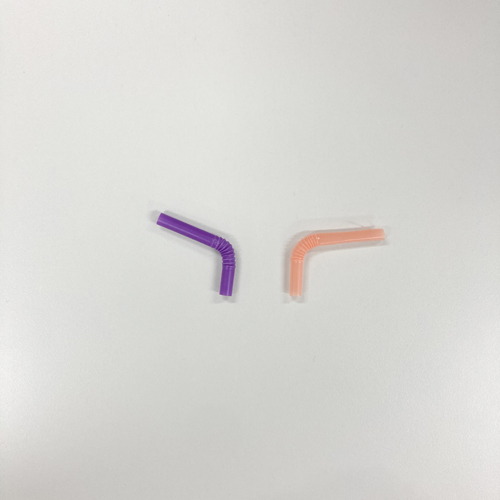
8. 빨대의 구부러지는 부분을 포함하여 적당한 길이로 잘라줍니다.

9. 한 쪽 빨대의 짧은 쪽에 글루건을 쏩니다.
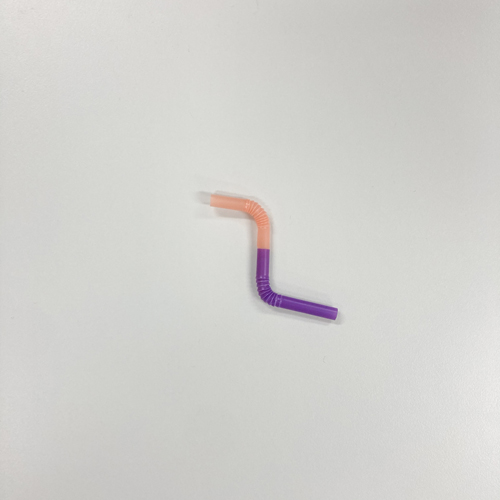
10. 남은 빨대의 긴 쪽에 칼집을 내어 글루건을 쏜 빨대에 꽂아 연결합니다.
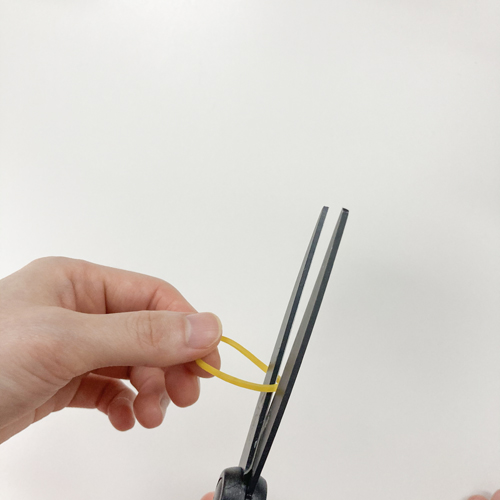
11. 고무줄을 반으로 자릅니다.

12. 연결한 빨대의 긴 쪽에 글루건을 쏩니다.

13. 글루건을 쏜 빨대 안으로 고무줄 넣어 고정합니다.

14. 자석 한 쪽에 글루건을 쏩니다.
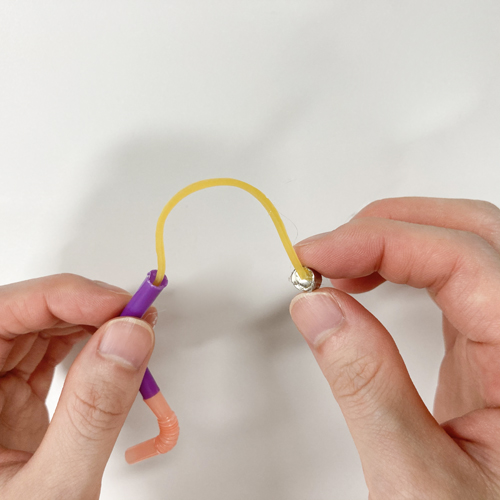
15. 자석을 고무줄 끝부분에 붙입니다.

16. 햄스터 실과키트의 스탠더드 쉴드에 서보 모터를 연결하고 혼을 꽂은 뒤 완성한 빨대 자석을 혼에 꽂아줍니다.
코딩을 해요.
코딩 하기
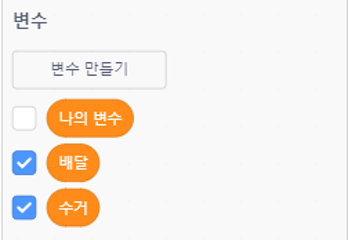
변수 추가하기
여러 로봇을 연결하여 코드에 활용할 때는 로봇이 연결되는 순서가 매번 바뀝니다.
변수를 활용하면 연결 순서가 바뀌더라도 변경사항을 일괄적으로 적용할 수 있습니다.
이번 프로젝트에서는 각 로봇의 역할에 해당하는 변수를 작성하였습니다.
1. 초기값 설정과 분류하기 코드를 작성합니다.
클릭하면 연결 순서에 따라 각 역할에 해당하는 햄스터 번호가 할당됩니다.
모델 불러오기는 스크래치3를 실행하고 처음으로 깃발을 클릭했을 때에만 수행합니다.
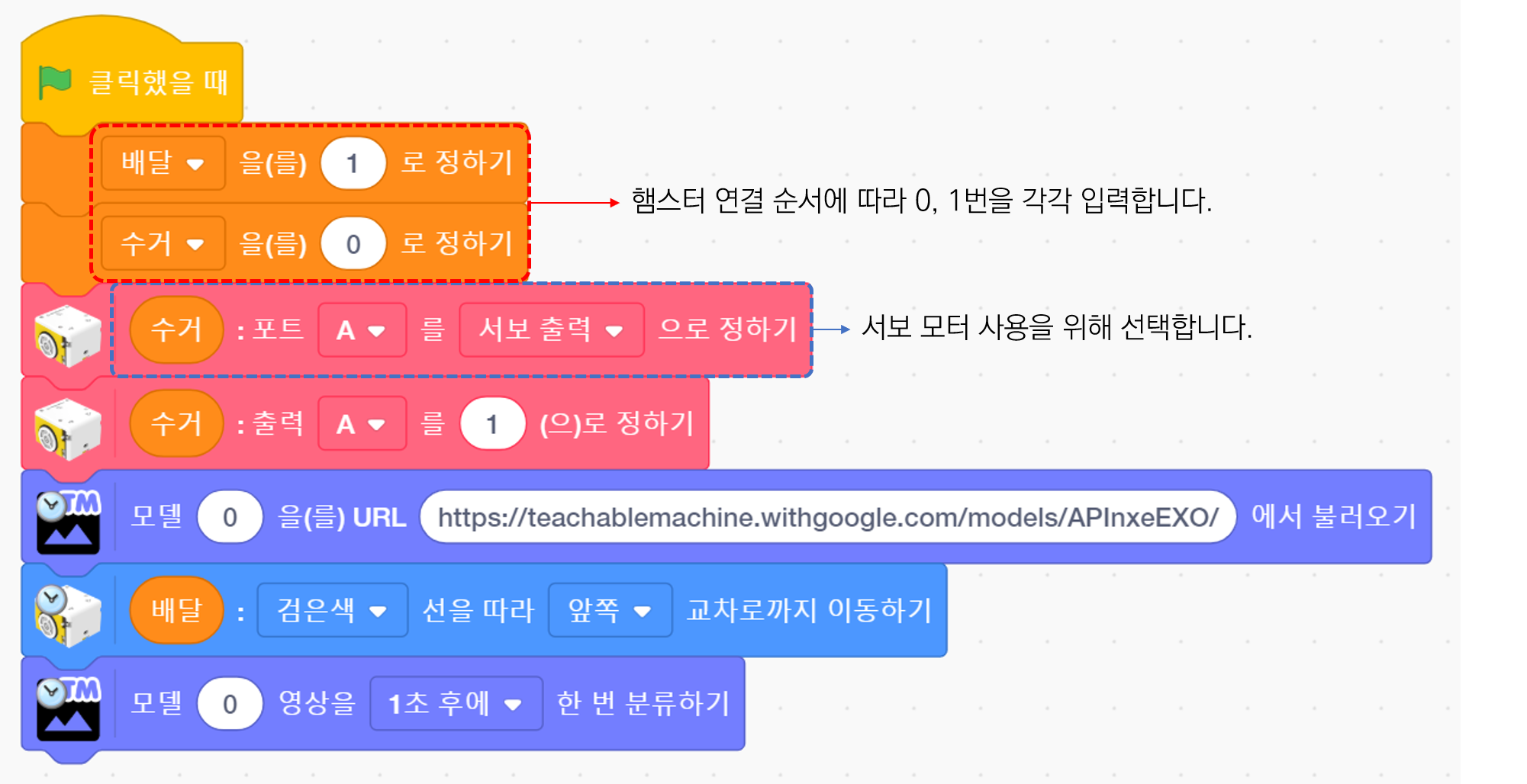
코드를 실행하면 햄스터가 교차로 까지 이동하고 멈춘 뒤 분류하기를 수행합니다.
2. 분류 결과에 따라 이동하는 코드를 작성합니다.
결과에 따라 햄스터가 다른 방향으로 방향을 튼 뒤 이동 신호를 보내는 코드입니다.
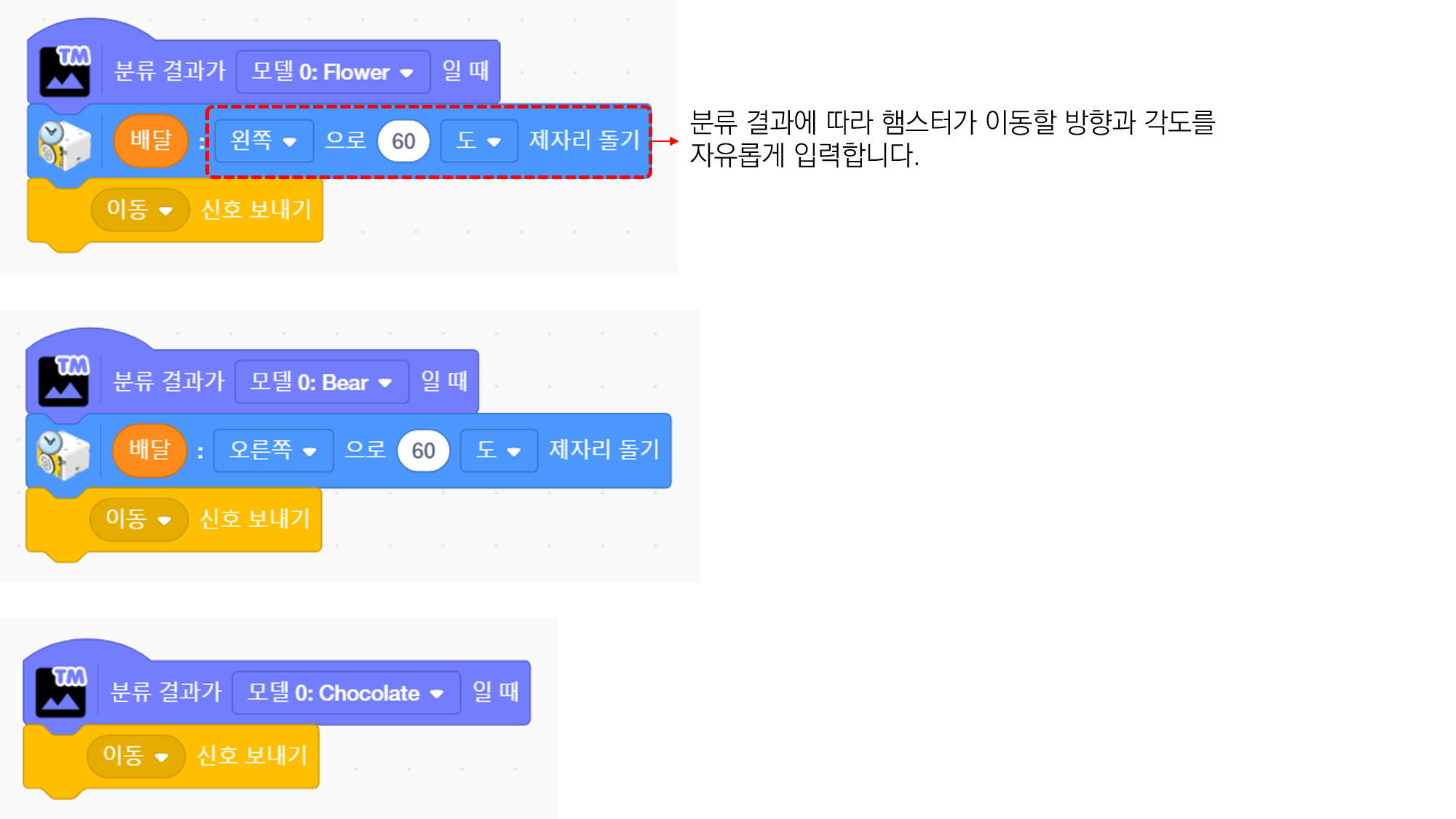
분류 결과에 따라 해당하는 선을 따라 햄스터가 선물을 배달합니다.
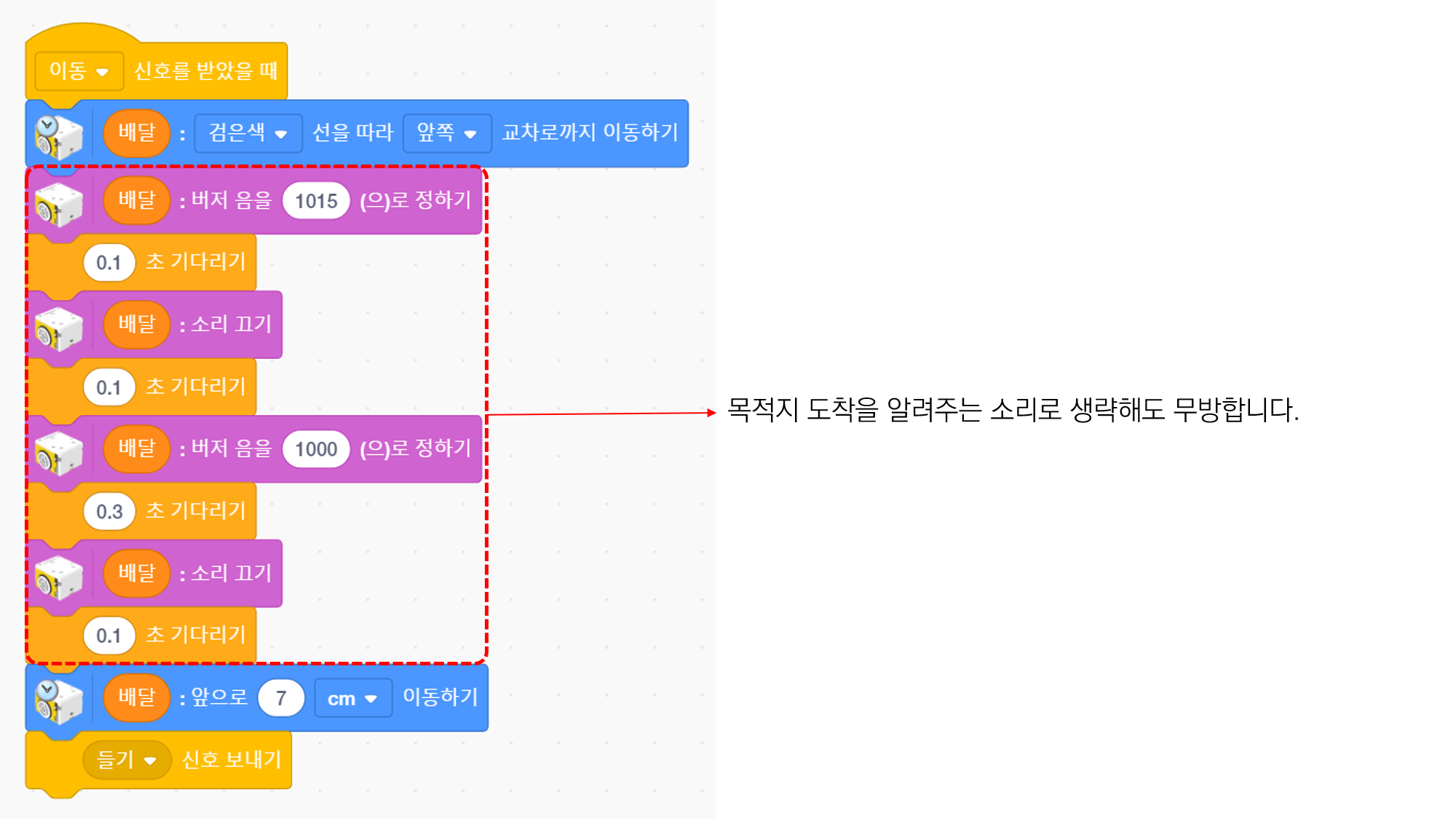
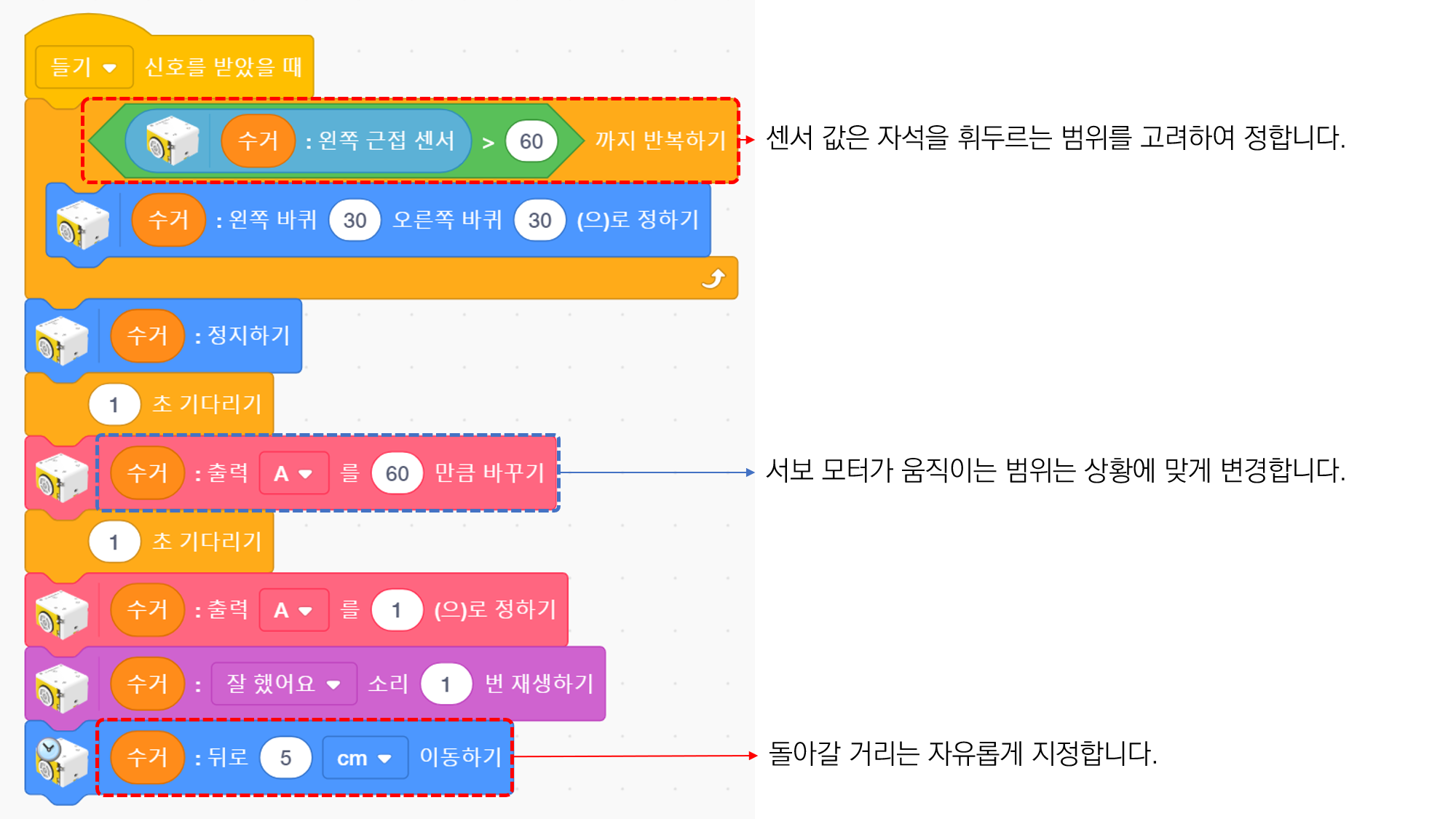
3. 선물을 가져가는 코드를 작성합니다.
배달하는 햄스터의 동작이 완료되면 수거하는 햄스터가 동작합니다.
수거용 햄스터의 변수는 로봇이 동작하는 상황에 맞춰 값을 조정합니다.
응용 하기
카트를 활용할 수 있는 여러분 만의 코드를 작성해 보아요!

